1. 线程异步
线程在创建的之后,一般都是独立自主,并发的,线程间会进行资源的竞争,那么就会引来一个问题,如果多个线程在同一时间对同一资源进行访问,修改,会造成资源破坏的结果,如下例子:
#include 运行结果如下: kunmzhao@build-245:~$ gcc 1.c -o main -lpthread ^C 这个例子中,两个线程分别打印一个全局变量并且加1,理想是从0开始,每次加1, 结果却事与愿违原因就在于异步带来的问题,所以我们希望当一个线程在操作某个可能被其他线程访问的资源时,只允许该线程操作,只有该线程结束操作资源时,其它线程才可以访问,这也就是线程同步 2. 线程同步 并发和异步带来了线程间资源的竞争的无序性, 因此需要同步机制来消除这种缺陷,实现线程正确有序共享数据,我们常用的方法就是锁,如互斥锁,读写锁和条件变量 3. 互斥锁 互斥锁可以保护多线程的共享资源,同一时刻只允许一个线程对临界区进行访问 互斥锁的使用流程如下: 1) . 初始化一个互斥锁 int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutexattr_t *attr) 2). 线程进入临界区前进行加锁 int pthread_mutex_lock(pthread_mutex_t *mutex) 3). 线程退出临界区前进行解锁 int pthread_mutex_unlock(pthread_mutex_t *mutex) 4). 在最后不用互斥锁时销毁 int pthread_mutex_destory(pthread_mutex_t *mutex) #include 运行结果如下: kunmzhao@build-245:~$ gcc 1.c -o main -lpthread 4. 读写锁 从上面我们可以看出,互斥锁只有两种状态,一个是上锁了,另一个就是没上锁,我们现在假设有10个线程,都要在同一时间访问某一个变量,每个线程要占用资源1秒,那么第十个线程就要等待10秒,这在多线程中是很不友好的。其实对某一个资源而言,只是访问该资源,而不是修改的时候,多个线程同时访问是不会破坏该资源的,因此我们引入读写锁。 读写锁分为读锁和写锁,一个线程在读取资源的时候,我们上读锁,而另一个线程也来读取资源的时候,发现上了读锁,但是仍然可以进入临界区,访问该资源。线程需要修改资源的时候需要上写锁,一旦某个线程上了写锁,他就跟互斥锁一样了,只能等待该线程解锁,其他线程的读锁和写锁才能再次访问 读写锁的使用: 1). 初始化读写锁 int pthread_rwlock_init(pthread_rwlock_t *rwlock, const pthread_rwlockattr_t *attr) rwlock:一个读写锁 attr:设置读写锁参数,常为NULL 返回值:成功:0, 失败:errno 2). 上读锁 int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock) rwlock:已经初始化的读写锁 返回值:成功0,失败:errno 3) 上写锁 int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock) rwlock:已经初始化的读写锁 返回值:成功0,失败:errno 4) 解锁 int pthread_rwlock_unlock(pthread_rwlock_t *rwlock) rwlock:已经上锁的读写锁 返回值:成功0,失败:errno 5)销毁读写锁 int pthread_rwlock_destroy(pthread_rwlock_t * rwlock) rwlock:已经初始化的互斥锁 返回值:成功0,失败:errno 下面用一个demon来展示读写锁和互斥锁的运行速度比拼 #include 运行结果如下: kunmzhao@build-245:~$ ./main 5. 条件变量 当我们希望一个线程在某个条件下才能执行,比如一个缓存区,其中一个线程不断读取,一个不断写入,当缓存区满了,则写线程就应该暂停,同理,缓存区空了,读线程就应该停止,我们引入条件变量来同步线程 条件变量使用步骤: 1)初始化一个条件变量 int pthread_cond_init(pthread_cond_t *cond, pthread_condattr_t *attr) cond:一个条件变量 attr:设置条件变量,常设置为NULL 返回值:成功:0, 失败:errno 2) 等待条件变量 int pthread_cond_wait(pthread_cond_t * cond, pthread_mutex_t * mutex) cond:已初始化的条件变量 mutex:已上锁的互斥锁 返回值:成功:0, 失败:errno 3) 唤醒等待变量 int pthread_cond_signal(pthread_cond_t *cond) cond:已经初始化的条件变量 返回值:成功:0, 失败:errno 注意点: 1. 条件变量必须和互斥锁配合使用 2. pthread_cond_wait()调用的时候必须已经上锁,因为第二个形参就是该互斥锁,因为该函数会解锁,同时条件变量会作为阻塞,等待唤醒的到来,醒来后会再次加锁 3. pthread_cond_signal()调用的时候,最后后面就是要解锁 #include
#include
#include
int g_num = 0;
void *pth_fun1(void *arg)
{
while(1) {
printf("%d\n", g_num++);
}
}
void *pth_fun2(void *arg)
{
while(1) {
printf("%d\n", g_num++);
}
}
int main(void)
{
pthread_t pth1, pth2;
int res = pthread_create(&pth1, NULL, pth_fun1, NULL);
if (res) {
printf("create pthread error!\n");
return 0;
}
res = pthread_create(&pth2, NULL, pth_fun2, NULL);
if (res) {
printf("create pthread error!\n");
return 0;
}
pthread_join(pth1, NULL);
pthread_join(pth2, NULL);
printf("hello world!\n");
return 0;
}
kunmzhao@build-245:~$ clear
kunmzhao@build-245:~$ gcc 1.c -o main -lpthread
kunmzhao@build-245:~$ ./main
0
2
3
4
5
1
7
8
9
#include
#include
int g_a = 100;
int g_b = 200;
pthread_mutex_t mutex;
void *pth_fun1(void *arg)
{
while(1) {
pthread_mutex_lock(&mutex); // 上锁
g_a -= 5;
g_b += 5;
pthread_mutex_unlock(&mutex); // 解锁
}
}
void *pth_fun2(void *arg)
{
while(1) {
pthread_mutex_lock(&mutex); // 上锁
printf("sum = %d\n", g_a + g_b);
pthread_mutex_unlock(&mutex); // 解锁
sleep(1);
}
}
int main(void)
{
// 初始化一个互斥锁
int res = pthread_mutex_init(&mutex, NULL);
if (res) {
printf("create mutex error!\n");
return 0;
}
// 创建线程
pthread_t pth1, pth2;
res = pthread_create(&pth1, NULL, pth_fun1, NULL);
if (res) {
printf("create pthread error!\n");
return 0;
}
res = pthread_create(&pth2, NULL, pth_fun2, NULL);
if (res) {
printf("create pthread error!\n");
return 0;
}
pthread_join(pth1, NULL);
pthread_join(pth2, NULL);
// 销毁线程
pthread_mutex_destroy(&mutex);
printf("hello world!\n");
return 0;
}
kunmzhao@build-245:~$ ./main
sum = 300
sum = 300
sum = 300
sum = 300
sum = 300
sum = 300
sum = 300
sum = 300
^C
kunmzhao@build-245:~$
#include
#include
int g_a = 100;
// 分别定义一个互斥锁和读写锁
pthread_mutex_t g_mutex;
pthread_rwlock_t g_rwlock;
// 线程1
void *pth_fun1(void *arg)
{
for(int i = 0; i <10000000; i++) {
pthread_mutex_lock(&g_mutex); // 上锁
int temp = g_a; // 只读全局变量
pthread_mutex_unlock(&g_mutex); // 解锁
}
pthread_exit(0);
}
// 线程2
void *pth_fun2(void *arg)
{
for(int i = 0; i <10000000; i++) {
pthread_mutex_lock(&g_mutex); // 上锁
int temp = g_a; // 只读全局变量
pthread_mutex_unlock(&g_mutex); // 解锁
}
pthread_exit(0);
}
// 线程3
void *pth_fun3(void *arg)
{
for(int i = 0; i <10000000; i++) {
pthread_rwlock_rdlock(&g_rwlock); // 上锁
int temp = g_a; // 只读全局变量
pthread_rwlock_unlock(&g_rwlock); // 解锁
}
pthread_exit(0);
}
// 线程4
void *pth_fun4(void *arg)
{
for(int i = 0; i <10000000; i++) {
pthread_rwlock_rdlock(&g_rwlock); // 上锁
int temp = g_a; // 只读全局变量
pthread_rwlock_unlock(&g_rwlock); // 解锁
}
pthread_exit(0);
}
// 互斥锁函数
void mutex_fun()
{
pthread_t pth1,pth2;
struct timeval start, end;
pthread_mutex_init(&g_mutex, NULL); // 初始化一个互斥锁
gettimeofday(&start, NULL);
int res = pthread_create(&pth1, NULL, pth_fun1, NULL);
if(res) {
printf("create pthread error!\n");
return ;
}
res = pthread_create(&pth2, NULL, pth_fun2, NULL);
if(res) {
printf("create pthread error!\n");
return ;
}
pthread_join(pth1, NULL);
pthread_join(pth2, NULL);
gettimeofday(&end, NULL);
long long total = (end.tv_sec - start.tv_sec) * 1000000 + (end.tv_usec - start.tv_usec);// 微秒
long total_msec = total / 1000; // 毫秒
printf("mutex takes %ld msec\n", total_msec);
pthread_mutex_destroy(&g_mutex);
return;
}
// 读写锁函数
void rwlock_fun()
{
pthread_t pth1,pth2;
struct timeval start, end;
pthread_rwlock_init(&g_rwlock, NULL);
gettimeofday(&start, NULL);
int res = pthread_create(&pth1, NULL, pth_fun3, NULL);
if(res) {
printf("create pthread error!\n");
return ;
}
res = pthread_create(&pth2, NULL, pth_fun4, NULL);
if(res) {
printf("create pthread error!\n");
return ;
}
pthread_join(pth1, NULL);
pthread_join(pth2, NULL);
gettimeofday(&end, NULL);
long long total = (end.tv_sec - start.tv_sec) * 1000000 + (end.tv_usec - start.tv_usec);// 微秒
long total_msec = total / 1000; // 毫秒
printf("rwlock takes %ld msec\n", total_msec);
pthread_rwlock_destroy(&g_rwlock);
return;
}
int main(void)
{
mutex_fun();
rwlock_fun();
printf("hello world!\n");
return 0;
}
mutex takes 1608 msec
rwlock takes 2679 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1753 msec
rwlock takes 2039 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1433 msec
rwlock takes 2877 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1646 msec
rwlock takes 2275 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1607 msec
rwlock takes 2124 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1350 msec
rwlock takes 2001 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1591 msec
rwlock takes 2448 msec
hello world!
kunmzhao@build-245:~$ ./main
mutex takes 1370 msec
rwlock takes 2973 msec
hello world!
kunmzhao@build-245:~$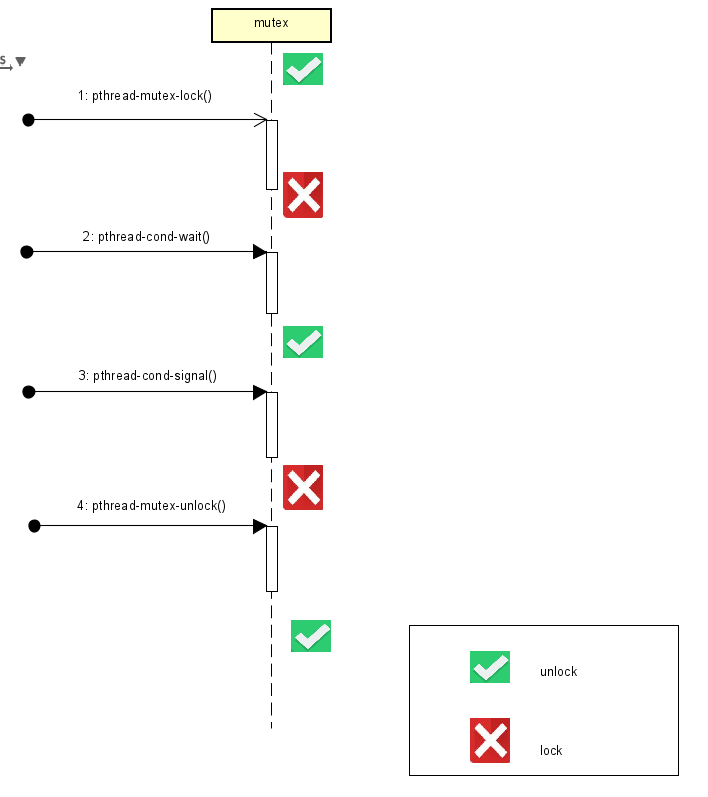
#include
char g_buff[100] = {0};
int g_buff_size = 0;
pthread_mutex_t g_mutex;
pthread_cond_t g_cond;
// put char in g_buff
void *pth_put(void *arg)
{
for(int i = 0; i <1000000; i++) {
if (g_buff == NULL)
return NULL;
pthread_mutex_lock(&g_mutex);
if (g_buff_size == 100) {
printf("put:g_buff is full!\n");
pthread_cond_wait(&g_cond, &g_mutex);
//printf("put :pthread received signal\n");
}
g_buff[g_buff_size] = 'A';
g_buff_size++;
if (g_buff_size == 1) {
//printf("put:g_buff is not empty!\n");
pthread_cond_signal(&g_cond);
}
pthread_mutex_unlock(&g_mutex);
}
}
// get char from g_buff
void *pth_get(void *arg)
{
for(int i = 0; i <1000000; i++) {
if(g_buff == NULL)
return NULL;
pthread_mutex_lock(&g_mutex);
if(g_buff_size == 0) {
printf("get:g_buff is empty!\n");
pthread_cond_wait(&g_cond, &g_mutex);
//printf("get :pthread received signal\n");
}
g_buff[g_buff_size - 1] = 0;
g_buff_size--;
if (g_buff_size == 00) {
//printf("get:g_buff is not full!\n");
pthread_cond_signal(&g_cond);
}
pthread_mutex_unlock(&g_mutex);
}
}
int main(void)
{
pthread_t pth1, pth2;
pthread_mutex_init(&g_mutex, NULL);
pthread_cond_init(&g_cond, NULL);
pthread_create(&pth1, NULL, pth_get, NULL);
pthread_create(&pth2, NULL, pth_put, NULL);
pthread_join(pth1, NULL);
pthread_join(pth2, NULL);
pthread_mutex_destroy(&g_mutex);
pthread_cond_destroy(&g_cond);
for (int i = 0; i <100; i++)
{
printf("%d ", g_buff[i]);
}
return 0;
}



 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有