作者:77阿建 | 来源:互联网 | 2023-10-15 15:04
命名方式(以28BYJ48步进电机为例)
28BYJ48步进电机的编号
28-----步进电机的有效最大外径是28毫米
B-----表示步进电机
Y-----表示永磁式
J-----表示减速型
48-----表示四相八拍
工作原理
1、五线四相步进电机,不同相位得电会让步进电机的转子转动一个角度,按一定规律给不同的相位通电,就可以让步进电机连续转动,下表就是通电的顺序。
表里面的顺,逆时针的方向只是代表相位给电时序,
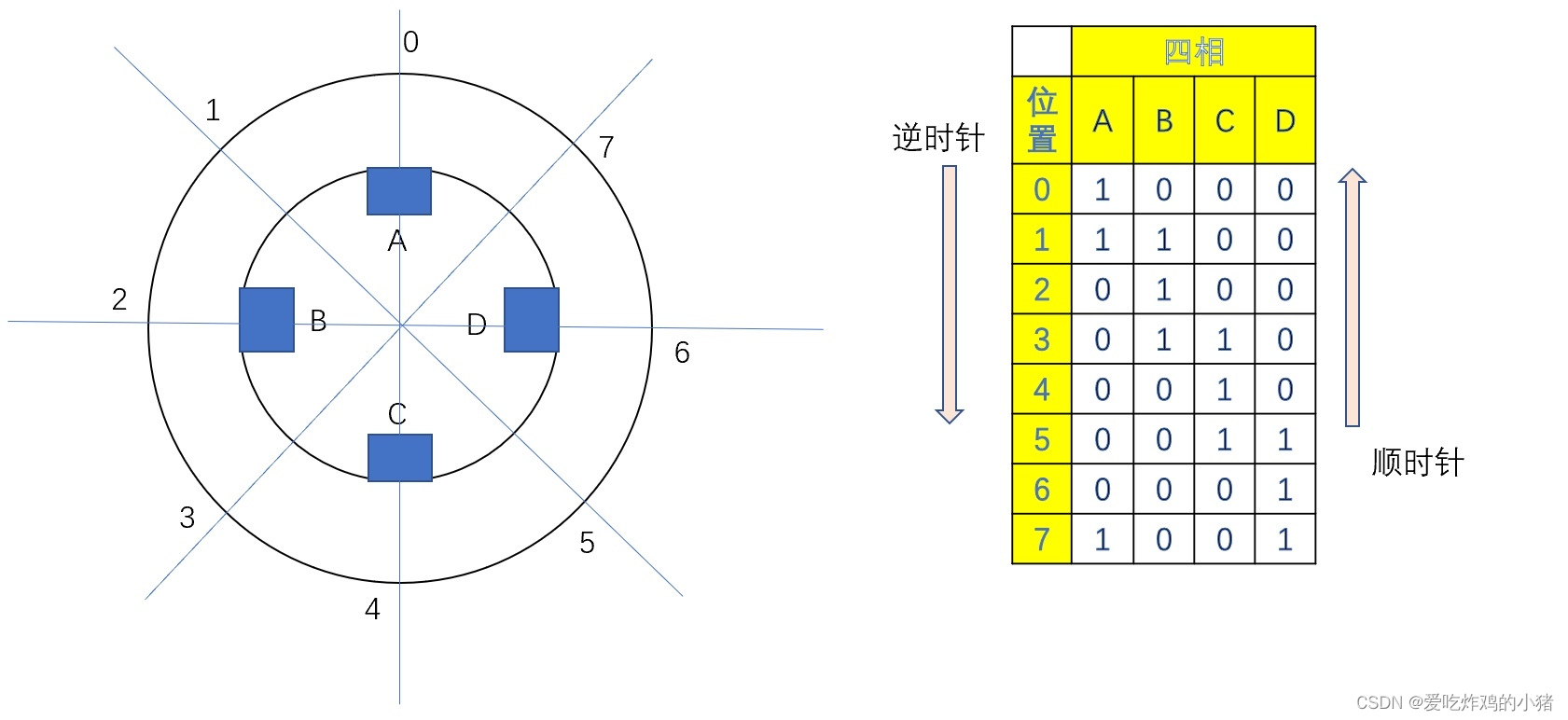
注:总共五条线,一个是VCC,剩下四条分别接上ABCD相
分别对应与ULN2003/ULN2003A驱动芯片的5V以及4个输入口对应连接
2、每走一个位置,都要给一定的延时,不然还没等转子到位,下一个脉冲就进来了,肯定会引起错误,导致电机堵转或者异常震动。
3、通过改变延时的时间,就可以控制电机的转速,不能太慢,也不要太快,不断调试到合理范围就行。
4、单片机IO口和电机四条相线连接时,一定不能错误,要按照顺序相连接。
5、调换得电的顺序,就可以控制电机的转向。

注意在51单片机中,为IO口置0相当于是高电平,而置1的时候相当于是低电平,和上面的图片一致(GND)
二、关键实验程序
在编写注释的时候用的是ANSI编码器,在这里部分注释可能会出现乱码,复制到编译器中就会正常显示(也注意一般用UTF-8编码器进行编写,ANSI编码器对中文不友好,一般一个汉字用的2个字符储存,所以在转存的时候就会出现乱码)
头文件
#ifndef __BSP_ULN2003_H__
#define __BSP_ULN2003_H__#include
#include "bsp_SysTick.h"#define STEPPER_ANGLE 0.703125 // 360/(4096/4)=360/512=0.703125enum dir{Pos, Neg}; //Pos = 0, Neg = 1 //enumΪ¶¨ÒåΪö¾Ù#define IN1_HIGH GPIO_WriteBit(GPIOA, GPIO_Pin_4, Bit_SET)
#define IN1_LOW GPIO_WriteBit(GPIOA, GPIO_Pin_4, Bit_RESET)#define IN2_HIGH GPIO_WriteBit(GPIOA, GPIO_Pin_5, Bit_SET)
#define IN2_LOW GPIO_WriteBit(GPIOA, GPIO_Pin_5, Bit_RESET)#define IN3_HIGH GPIO_WriteBit(GPIOA, GPIO_Pin_6, Bit_SET)
#define IN3_LOW GPIO_WriteBit(GPIOA, GPIO_Pin_6, Bit_RESET)#define IN4_HIGH GPIO_WriteBit(GPIOA, GPIO_Pin_7, Bit_SET)
#define IN4_LOW GPIO_WriteBit(GPIOA, GPIO_Pin_7, Bit_RESET)void ULN2003_Configuration(void);
void stepper(unsigned int dir, unsigned int speed);
void angle_control(unsigned int dir, double angle, unsigned int speed);#endif
调用函数
/*Á¬Ïß±í£ºSTM32 ULN2003Çý¶¯PA4 <-------> IN1PA5 <-------> IN2PA6 <-------> IN3PA7 <-------> IN45V 28BYJ-48²½½øµç»ú£¬ÄÚ²¿´øÓмõËÙ×°Öà ¼õËٱȣº1/64 ²½¾à½Ç£º5.625¡ã/64£¨64¸öÂö³åת¶¯5.625¡ã£©ÕýÏòת¶¯£ºËÄÏà°ËÅÄ¿ØÖÆ˳Ðò£º(A-AB-B-BC-C-CD-D-DA)1 2 3 4 5 6 7 8A - - + + + + + -B + - - - + + + +C + + + - - - + +D + + + + + - - -
·´Ïòת¶¯£º(DA-D-CD-C-BC-B-AB-A)
*/#include "bsp_uln2003.h"void ULN2003_Configuration(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_WriteBit(GPIOA, GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7, Bit_RESET);
}//ËٶȿØÖÆ:
/*
dir: ˳£¬ÄæʱÕëÐýת·½Ïò
speed£º×ªËÙ£¬·¶Î§[1,100]
*/
void stepper(unsigned int dir, unsigned int speed)
{if(dir == Pos){//step1:IN1_HIGH;IN2_LOW;IN3_LOW;IN4_LOW;Delay_us(speed);//step2: IN1_HIGH;IN2_HIGH;IN3_LOW;IN4_LOW;Delay_us(speed);//step3: IN1_LOW;IN2_HIGH;IN3_LOW;IN4_LOW;Delay_us(speed);//step4:IN1_LOW;IN2_HIGH;IN3_HIGH;IN4_LOW;Delay_us(speed);//step5:IN1_LOW;IN2_LOW;IN3_HIGH;IN4_LOW;Delay_us(speed);//step6:IN1_LOW;IN2_LOW;IN3_HIGH;IN4_HIGH;Delay_us(speed);//step7:IN1_LOW;IN2_LOW;IN3_LOW;IN4_HIGH;Delay_us(speed);//step8:IN1_HIGH;IN2_LOW;IN3_LOW;IN4_HIGH;Delay_us(speed);}else{//step1:IN1_HIGH;IN2_LOW;IN3_LOW;IN4_HIGH;Delay_us(speed);//step2: IN1_LOW;IN2_LOW;IN3_LOW;IN4_HIGH;Delay_us(speed);//step3: IN1_LOW;IN2_LOW;IN3_HIGH;IN4_HIGH;Delay_us(speed);//step4:IN1_LOW;IN2_LOW;IN3_HIGH;IN4_LOW;Delay_us(speed);//step5:IN1_LOW;IN2_HIGH;IN3_HIGH;IN4_LOW;Delay_us(speed);//step6:IN1_LOW;IN2_HIGH;IN3_LOW;IN4_LOW;Delay_us(speed);//step7:IN1_HIGH;IN2_HIGH;IN3_LOW;IN4_LOW;Delay_us(speed);//step8:IN1_HIGH;IN2_LOW;IN3_LOW;IN4_LOW;Delay_us(speed);}
}//½Ç¶È¿ØÖÆ£º
/*
dir: ˳£¬ÄæʱÕëÐýת·½Ïò
angle£º½Ç¶È£¬·¶Î§[0,360]
speed£º×ªËÙ£¬·¶Î§[1,100]
*/void angle_control(unsigned int dir, double angle, unsigned int speed)
{int i;for(i = 0; i }
//µ÷ÓÃÕâ¸öº¯Êý¿ØÖƽǶÈÓнÏСµÄÎó²î»ò˵ÊÇȱÏÝ£ºÒ»ÊÇ˵stepper(dir, speed);ÊÇÒÔ°ËÅÄΪ×îС·Ö¶ÈÖµ
//Æä´ÎÊÇ£¬forº¯ÊýÖÐ×îС²½¾àΪ1£¬ºÜÏÔÈ»angle / STEPPER_ANGLE ×î¶àÓÐÒ»¸ö°ËÅĵÄÎó²î£¬
//¼´5.624/64*8=0.703¶È£¬Ò²²»ÊǺܴ󣬿ÉÒÔºöÂÔ²»¼Æ
1、步进电机的减速比为1/64,即转子转动64圈,外面的转轴才会转动1圈
2、步进电机的步距角为5.624/64 (步进电机的定子绕组每次改变一次通电状态,步进电机外面的转轴转过的角度称步距角;即步进电机的最小旋转角度)
3、所以360/(5.624/64)≈ 4096 (步进电机外面的转轴转过一圈所需要改变定子绕组的通电状态次数)
这里补充介绍一个概念:步进角
步进电机的定子绕组每次改变一次通电状态,转子转过的角度称步进角。
(可以认为是电机内部的转子的最小旋转角度)
步进角 = (360)/m * Z * C
m-----定子相数
Z-----转子磁极对数
C-----通电方式
{ C = 1 ,单相轮流通电,双相轮流通电方式
C = 2 , 双相轮流通电方式
1,相数:是指产生不同对极N,S磁场的激磁线圈对数
2,拍数:完成一个周期性变化所需脉冲数,以四相电机为例,有单相四拍的运行方式:(A-B-C-D),有双相四拍的运行方式:(AB-BC-CD-DA),有四相八拍的运行方式:(A-AB-B-BC-C-CD-D-DA)
这里的源码用的是双相轮流通电方式,在源码中可以看到四个相位MA,MB,MC,MD使能为高电平状态的相位数为相邻2个或1个(A-AB-B-BC-C-CD-D-DA)
步进电机的相关参数:

注意事项:由于电机的制造误差,安装误差,单片机的误差还有软件延时函数误差,这些误差累加起来之后,就会导致电机的转速、转动角度出现一定的误差。








 京公网安备 11010802041100号
京公网安备 11010802041100号