1、前言
本个CenterNet系列的代码地址为:zzzxxxttt/torch_simple_CenterNet_45
此次主要记录的是数据处理方面,主要针对COCO数据。主要涉及脚本为:
datasets/coco.py、utils/images.py
以下主要结合代码进行对一些关键点和难点进行记录。
2、主要内容

这里主要对COCO数据集包含的对象进行罗列&#xff0c;这里额外加入了__background__&#xff0c;代表背景&#xff0c;同时列出对象所对应的编号&#xff0c;但其并不是连续的&#xff0c;从末尾是90而类别是80&#43;1即可知道不对应&#xff0c;所以其并不连续&#xff1b;然后就是一些数据处理所需要用到的一些特定的常量。&#xff08;图在上方 > - <&#xff09;
def __init__(self, data_dir, split, split_ratio&#61;1.0, img_size&#61;512): super(COCO, self).__init__() self.num_classes &#61; 80 self.class_name &#61; COCO_NAMES self.valid_ids &#61; COCO_IDSself.cat_ids &#61; {v: i for i, v in enumerate(self.valid_ids)}self.data_rng &#61; np.random.RandomState(123) self.eig_val &#61; np.array(COCO_EIGEN_VALUES, dtype&#61;np.float32) self.eig_vec &#61; np.array(COCO_EIGEN_VECTORS, dtype&#61;np.float32) self.mean &#61; np.array(COCO_MEAN, dtype&#61;np.float32)[None, None, :] self.std &#61; np.array(COCO_STD, dtype&#61;np.float32)[None, None, :]self.split &#61; split self.data_dir &#61; os.path.join(data_dir, &#39;COCO2017/&#39;) self.img_dir &#61; os.path.join(self.data_dir, &#39;images/%s2017&#39; % split)if split &#61;&#61; &#39;test&#39;: self.annot_path &#61; os.path.join(self.data_dir, &#39;annotations&#39;, &#39;image_info_test-dev2017.json&#39;) else: self.annot_path &#61; os.path.join(self.data_dir, &#39;annotations&#39;, &#39;instances_%s2017.json&#39; % split)self.max_objs &#61; 128 self.padding &#61; 127 self.down_ratio &#61; 4self.img_size &#61; {&#39;h&#39;: img_size, &#39;w&#39;: img_size}self.fmap_size &#61; {&#39;h&#39;: img_size // self.down_ratio, &#39;w&#39;: img_size // self.down_ratio}self.rand_scales &#61; np.arange(0.6, 1.4, 0.1)self.gaussian_iou &#61; 0.7print(&#39;&#61;&#61;> initializing coco 2017 %s data.&#39; % split) self.coco &#61; coco.COCO(self.annot_path)self.images &#61; self.coco.getImgIds()
接着是class COCO(data.Dataset)这个类&#xff0c;这是这个脚本的核心。def __init__()是进行的一些初始化处理操作&#xff0c;其中比较重要的是:
self.annot_path &#61; os.path.join(self.data_dir, &#39;annotations&#39;, &#39;instances_%s2017.json&#39; % split)
self.coco &#61; coco.COCO(self.annot_path)
self.images &#61; self.coco.getImgIds()
首先我们看coco这个库&#xff0c;需要我们导入pycocotools&#xff0c;这个的安装&#xff0c;具体可参考如下博客&#xff1a;
Windows下安装 pycocotools
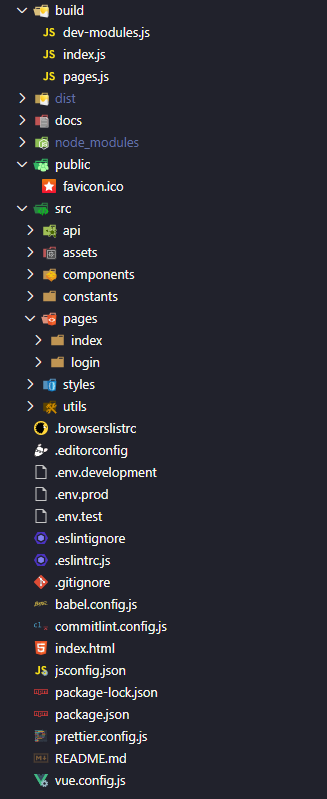
安装好这个后&#xff0c;我们便来获取coco数据&#xff0c;如下是coco2017的目录结构&#xff1a;

训练所采用的是instances_train2017.json&#xff0c;通过此json标签文件&#xff0c;加上coco库&#xff0c;便可轻松获取COCO数据集我们想要的内容&#xff0c;如图片&#xff0c;图片所包含的物体的种类和编号&#xff0c;已经对应的bbox&#xff0c;都可以&#xff0c;具体操作流程如下&#xff1a;
self.coco &#61; coco.COCO(self.annot_path)
self.images &#61; self.coco.getImgIds()
img_id &#61; self.images[0]
img_path &#61; os.path.join(self.img_dir, self.coco.loadImgs(ids&#61;[img_id])[0][&#39;file_name&#39;])
ann_ids &#61; self.coco.getAnnIds(imgIds&#61;[img_id])
annotations &#61; self.coco.loadAnns(ids&#61;ann_ids)labels &#61; np.array([self.cat_ids[anno[&#39;category_id&#39;]] for anno in annotations])
bboxes &#61; np.array([anno[&#39;bbox&#39;] for anno in annotations], dtype&#61;np.float32)
下图是获取到的self.coco的内容&#xff1a;

这里的anns&#xff0c;是图片中物体所在位置的bbox的坐标&#xff0c;其下的category_id&#xff0c;代表物体所属种类的编号&#xff0c;id&#xff0c;代表所属图片的标号&#xff0c;由于一张图片中可能存在多个物体&#xff0c;故可能出现不同的ann所属id相同的情况。这里的长度是860001。

这个的imgs&#xff0c;主要的作用是提供img所在路径&#xff0c;即提供file_name&#xff0c;图片名称&#xff0c;通过图片名称和根目录来读取图片。其长度为118287。

然后是def __getitem__(self, index)这个函数&#xff0c;也是数据处理和获取的主要函数。
下面这些主要是获取每张图片上的标签信息&#xff0c;包括其所属类别&#xff0c;bbox框&#xff0c;同时最后转化为[x1,y1,x2,y2]这种格式。(需要记住这种获取coco数据集的方法)
def __getitem__(self, index):img_id &#61; self.images[index]img_path &#61; os.path.join(self.img_dir, self.coco.loadImgs(ids&#61;[img_id])[0][&#39;file_name&#39;])ann_ids &#61; self.coco.getAnnIds(imgIds&#61;[img_id])annotations &#61; self.coco.loadAnns(ids&#61;ann_ids)labels &#61; np.array([self.cat_ids[anno[&#39;category_id&#39;]] for anno in annotations])bboxes &#61; np.array([anno[&#39;bbox&#39;] for anno in annotations], dtype&#61;np.float32)if len(bboxes) &#61;&#61; 0:bboxes &#61; np.array([[0., 0., 0., 0.]], dtype&#61;np.float32)labels &#61; np.array([[0]])bboxes[:, 2:] &#43;&#61; bboxes[:, :2]
然后是数据增强处理&#xff08;代码见下方&#xff0c;示意图下&#xff09;&#xff0c;包括翻转、仿射变化&#xff08;包括放缩&#xff0c;裁剪等&#xff09;。翻转&#xff0c;即flipped为True时&#xff0c;代表进行翻转&#xff0c;img &#61; img[ :, : :-1 , : ]作用是水平翻转&#xff0c;img &#61; img[ : : -1 , : , : ]代表的是上下翻转&#xff1b;然后是get_border()这个函数&#xff0c;位于utils/image.py中&#xff0c;作用是当图片的w/h大于256时&#xff0c;便返回128&#xff0c;否则返回64&#xff0c;意思是图片较大时返回128&#xff0c;较小是返回64&#xff0c;然后center便是其选定的中心点&#xff0c;可见下面的示意图。然后是get_affine_transform()这个函数&#xff0c;其作用是求warpAffine()所需的变换矩阵&#xff0c;求变换矩阵&#xff0c;至少需要3个点&#xff0c;刚才的center是一个点&#xff0c;然后通过旋转一定角度又是一个点&#xff0c;在通过对称又可以获得一个点。这些点的处理全部位于utils/image.py中的get_affine_transform()函数中&#xff0c;其中&#xff0c;get_dir()是获取旋转后的点&#xff0c;get_3rd_point是获取对称的点。

flipped &#61; Falseif self.split &#61;&#61; &#39;train&#39;:scale &#61; scale * np.random.choice(self.rand_scales)w_border &#61; get_border(128, width)h_border &#61; get_border(128, height)center[0] &#61; np.random.randint(low&#61;w_border, high&#61;width - w_border)center[1] &#61; np.random.randint(low&#61;h_border, high&#61;height - h_border)if np.random.random() < 0.5:flipped &#61; Trueimg &#61; img[:, ::-1, :]center[0] &#61; width - center[0] - 1trans_img &#61; get_affine_transform(center, scale, 0, [self.img_size[&#39;w&#39;], self.img_size[&#39;h&#39;]])img &#61; cv2.warpAffine(img, trans_img, (self.img_size[&#39;w&#39;], self.img_size[&#39;h&#39;]))
接着&#xff0c;是下面的代码&#xff0c;归一化操作&#xff0c;颜色增强&#xff0c;均值处理&#xff0c;通道变化&#xff0c;特征图的变化矩阵&#xff0c;初始化所要用的参数&#xff0c;对bbox坐标点也进行相应的仿射变化&#xff0c;然后求出包含对象的中心点。
img &#61; img.astype(np.float32) / 255.if self.split &#61;&#61; &#39;train&#39;:color_aug(self.data_rng, img, self.eig_val, self.eig_vec)img -&#61; self.meanimg /&#61; self.stdimg &#61; img.transpose(2, 0, 1) trans_fmap &#61; get_affine_transform(center, scale, 0, [self.fmap_size[&#39;w&#39;], self.fmap_size[&#39;h&#39;]])hmap &#61; np.zeros((self.num_classes, self.fmap_size[&#39;h&#39;], self.fmap_size[&#39;w&#39;]), dtype&#61;np.float32) w_h_ &#61; np.zeros((self.max_objs, 2), dtype&#61;np.float32) regs &#61; np.zeros((self.max_objs, 2), dtype&#61;np.float32) inds &#61; np.zeros((self.max_objs,), dtype&#61;np.int64)ind_masks &#61; np.zeros((self.max_objs,), dtype&#61;np.uint8)for k, (bbox, label) in enumerate(zip(bboxes, labels)):if flipped:bbox[[0, 2]] &#61; width - bbox[[2, 0]] - 1bbox[:2] &#61; affine_transform(bbox[:2], trans_fmap)bbox[2:] &#61; affine_transform(bbox[2:], trans_fmap)bbox[[0, 2]] &#61; np.clip(bbox[[0, 2]], 0, self.fmap_size[&#39;w&#39;] - 1)bbox[[1, 3]] &#61; np.clip(bbox[[1, 3]], 0, self.fmap_size[&#39;h&#39;] - 1)h, w &#61; bbox[3] - bbox[1], bbox[2] - bbox[0]if h > 0 and w > 0:obj_c &#61; np.array([(bbox[0] &#43; bbox[2]) / 2, (bbox[1] &#43; bbox[3]) / 2], dtype&#61;np.float32)obj_c_int &#61; obj_c.astype(np.int32)
最后&#xff0c;是关于高斯处理的一些知识&#xff0c;具体见下列代码。首先是获取’‘高斯半径’’&#xff0c;具体求解见gaussian_radius这个函数&#xff0c;见下列图片&#xff0c;可以看出&#xff0c;是r1,r2,r3中的最小值。当时初看的时候&#xff0c;感觉很像二次函数的求根公式&#xff0c;后来经查询资料&#xff0c;果然真是。。。具体推导&#xff0c;可见下列我的手写版&#xff0c;也可参考下列网址讲解heatmap里面如何应用高斯散射核。求出高斯半径之后&#xff0c;便是绘制高斯核&#xff0c;这个主要是要了解高斯的二位表达式&#xff0c;然后数据获取到此基本结束&#xff0c;最后return所需要的东西即可。

radius &#61; max(0, int(gaussian_radius((math.ceil(h), math.ceil(w)), self.gaussian_iou)))draw_umich_gaussian(hmap[label], obj_c_int, radius)w_h_[k] &#61; 1. * w, 1. * hregs[k] &#61; obj_c - obj_c_int inds[k] &#61; obj_c_int[1] * self.fmap_size[&#39;w&#39;] &#43; obj_c_int[0]ind_masks[k] &#61; 1

3、总结
这部分代码不是很难&#xff0c;主要是对一些数据处理方法、数学知识等的理解&#xff0c;明白代码所代表的的含义&#xff0c;理解原理才是难点。故记录一下。






 京公网安备 11010802041100号
京公网安备 11010802041100号