1简介相位噪声是振荡器的基本指标之一。经验丰富的工程师可以通过查看相位噪声图来了解有关振荡器质量以及它是否适合应用的很多信息。RF工程师专注于某些载波偏移频率下的相位噪声水平&#
1 简介
相位噪声是振荡器的基本指标之一。 经验丰富的工程师可以通过查看相位噪声图来了解有关振荡器质量以及它是否适合应用的很多信息。 RF 工程师专注于某些载波偏移频率下的相位噪声水平,以确保可以支持所需的调制方案。 设计 40GbE 等高速串行链路的专业人员将带通滤波器应用于参考时钟的相位噪声,对其进行积分,并将其转换为相位抖动以预测系统的误码率。
本应用指南首先简要介绍相位噪声和相位噪声测量方法的理论概述,然后重点介绍实用的相位噪声测量建议,例如将被测信号正确连接到仪器、设置相位噪声分析仪以及选择合适的相位噪声分析仪。 设置。 本文档中的所有测量均使用 Keysight E5052B 相位噪声分析仪进行,该分析仪是北美最常用的相位噪声测量仪器之一。
2 什么是相位噪声
相位噪声是信号短期相位不稳定性的频域表示。 相位噪声通常被描述为单边带 (SSB) 相位噪声并表示为 L(f)。 相位噪声的经典定义是在载波偏移频率处测得的功率谱密度与信号总功率之比。 出于实际目的,此定义已稍作修改,以便在载波偏移频率处测量的功率谱密度以载波功率为参考,而不是以总积分信号功率为参考(图 2-1)。
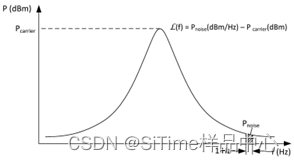
图 2-1:经典相位噪声定义
使用频谱分析仪测量相位噪声时,经典定义很方便,但它结合了幅度和相位噪声效应。 它还对具有高相位噪声的信号有限制。 经典定义通常适用于峰峰值相位偏差远小于 1弧度的信号。 它也永远不能大于0dB,因为信号中的噪声功率不能大于信号的总功率。
最近,相位噪声被重新定义为相位波动 L(f) = SΦ(f)/2 的功率谱密度的一半。 理想的正弦波可以表示为 f(t) = A∙sin(ωt + φ)。 具有相位噪声的正弦波可以表示为 f(t) = A∙sin(ωt + φ(t)),其中 φ(t) 是相位噪声。 那么 SΦ(f) 是 φ(t) 的功率谱密度。 以这种方式定义时,相位噪声与幅度噪声是分开的。 它也可以大于 0 dB,这意味着相位变化大于 1 弧度。
3 相位噪声测量方法
有两种广泛使用的相位噪声测量方法。 第一个使用频谱分析仪的功率谱测量和相位噪声的经典定义。 信号频谱是在一定的分辨率带宽下测量的。 然后计算相位噪声,如图 2-1 所示。
第二种方法通过 SΦ(f) 与最新的相位噪声定义兼容,并使用相位检测器技术。 这种方法的基本原理是使用鉴相器将被测信号与参考信号进行比较。 鉴相器的输出与其输入之间的相位差成正比(图 3-1)。

图 3-1:相位噪声测量的相位检测器方法
鉴相器方法有很多种。 Keysight E5052B 分析仪实现了此方法的两种不同变体,在仪器设置中称为“正常”和“宽”。
正常模式是一种 PLL 方法,它使用 PLL 将参考振荡器锁定到被测信号。 这样做是为了使参考信号和源信号在相位检测器输入上保持 90° 相位差。 相位检测器的输出使用 ADC 进行采样,并使用快速傅立叶变换 (FFT) 计算 SΦ(f)。
在宽测量模式下,E5052B 使用所谓的外差(数字)鉴别器方法。 它使用模拟混频器将被测信号转换为中频 (IF),然后用 ADC 对其进行采样。 相位检测器在 DSP 中实现,它将信号与自身的延迟版本进行比较。 相位检测器的输出用数字低通滤波器进行滤波,以将相位差分量与高频分量分开。 这个代表相位噪声的时域数字信号然后在 DSP 中通过 FFT 和归一化运行。
正常模式用于稳定的时钟源。 它提供了最佳的灵敏度和广泛的偏移覆盖范围。 对于具有高电平接近载波相位噪声的信号,建议使用宽模式。 互相关可用于提高外差(数字)鉴别器方法的测量灵敏度,尤其是在接近偏移处。
4 将信号连接到相位噪声分析仪
4.1 信号电平和热噪声
热噪声是由导体中电荷载流子的热运动产生的电子噪声。 它表示为给定温度下每赫兹带宽的平均噪声功率。 电阻器的温度越高,电荷载流子的动能就越高,这导致温度越高噪声越大。 热噪声本质上是宽带的,并且具有近似平坦的频谱。
热噪声可以限制弱信号的相位噪声测量本底噪声。 室温下的热噪声为 -174 dBm/Hz。 热噪声中的相位噪声功率部分比总功率小 3 dB,导致在室温下为 -177 dBm/Hz。 相位噪声测量的理论本底噪声是载波信号功率与热噪声的相位噪声部分之间的差值。 表 4-1 显示了不同功率电平输入信号的理论相位噪声测量本底噪声。
表 4-1:作为信号功率函数的理论相位噪声测量本底噪声
4.2 有源放大器和探头
可能需要有源放大器将被测信号路由到相位噪声分析仪,例如当信号太弱而无法直接连接到仪器的 50Ω 输入时。 一个典型的例子是在精密 TCXO 和 OCXO 中经常看到的削波正弦输出类型。 削波正弦输出驱动器的阻抗相对较高,不能直接驱动 50Ω 负载。 另一个例子是在不加载电路的情况下测量客户板上的相位噪声。
任何有源放大器都有自己的噪声系数,并在信号通过放大器时向源信号添加噪声。 结果,与输入信号相比,放大器输出端的信噪比降低。 如果在将被测信号连接到相位噪声分析仪之前必须对其进行放大或缓冲,则必须考虑放大器的噪声系数以确保放大器添加的噪声可以忽略不计。
有源探头提供了一种访问系统或评估板上信号的便捷方式。 它们为系统增加了最小的寄生负载,并附带了许多附件,可以轻松连接到电路板上的走线、引脚、探针点或其他功能。 有源探头主要设计用于高带宽信号的精确波形测量。 因此,使用有源探头进行相位噪声测量时存在两个主要问题:
- 有源探头具有高带宽,会给信号增加大量宽带噪声。
- 为确保探头的高带宽能力,探头中的放大器对信号电平进行分频。 这意味着相位噪声分析仪输入上的信号功率会降低,并且由于热噪声而导致测量本底噪声降低。
不建议使用有源探头进行相位噪声测量。
4.3 振荡器输出信号类型
振荡器可以有不同的输出信号类型。 两大类是单端信号和差分信号。 单端信号在相对于公共地的单线上承载时钟信号。 差分信号使用两根信号线传输相同的时钟信号,这些时钟信号彼此相差 180°。
本章将提供将最常见的信号类型连接到相位噪声分析仪的建议。
4.3.1 单端 LVCMOS
LVCMOS 是一种单端输出类型,通常具有从 0V 到 VDD 的输出电平。 输出阻抗通常介于 20Ω 和 40Ω 之间。 LVCMOS 输出通常可以直接连接到相位噪声分析仪的 50Ω 输入,但需要记住以下几点:
- 必须使用 50 Ω 屏蔽电缆进行连接&#xff0c;最好保持较短的长度 (<&#61; 3 英尺)&#xff0c;以最大程度地减少插入损耗和随之而来的信号衰减。
- 相位噪声分析仪的输入端具有 50Ω 端接&#xff0c;将 50Ω 负载加载到振荡器会从输出驱动器吸取大量电流。 这种功耗会略微增加内部芯片温度。 来自驱动器的高电流消耗的另一个影响是相位噪声中称为杂散的谐波分量的水平。 如果有任何与输出驱动器对振荡器电路中其他模块的影响相关的杂散&#xff0c;则增加驱动器电流可能会增加这些杂散的电平&#xff0c;并且它们的幅度将比正常负载条件下的幅度更大。
4.3.2 单端削峰正弦
削峰正弦输出是单端输出&#xff0c;具有缓慢的上升/下降时间和降低的信号电平&#xff0c;精密 TCXO 和 OCXO 经常会遇到这种情况。 这种输出的输出阻抗相对较高&#xff08;kΩ 范围&#xff09;&#xff0c;将削峰正弦输出直接连接到相位噪声分析仪的 50 Ω 输入意味着信号功率低&#xff0c;热噪声将显着限制测量本底噪声。 例如&#xff0c;具有 1 kΩ 源阻抗和 1V 峰峰值电压的削波正弦输出将为 50 Ω 仪器输入提供大约 -20 dBm 的功率。 这导致理论测量本底噪声为 -157 dBc/Hz&#xff0c;这对于应该在与载波偏移 5 MHz 处达到 -170 dBc/Hz 的时钟信号是不可接受的。
为了避免这种情况&#xff0c;必须将信号功率提升到可接受的水平。 一种选择是使用低噪声射频放大器&#xff0c;如 Mini-Circuits ZX60-3018G-S&#43;&#xff08;图 4-1&#xff09;。 它具有 SMA 输入和 SMA 输出&#xff0c;可以轻松地注入到测量设置中。

图 4-1&#xff1a;微型电路射频放大器 ZX60-3018G-S&#43;
4.3.3 差分输出
振荡器最常见的差分信号类型是 LVPECL 和 LVDS。 不太流行但仍在某些应用程序中使用的是 HCSL。 差分输出具有许多优点&#xff1a;共模降噪、抗噪声耦合、出色的电源噪声抑制和高频能力。
相位噪声分析仪通常有单端输入&#xff0c;但差分接口有两个输出。 将差分输出连接到具有 50 Ω 输入的单端仪器的最简单方法是将其中一个输出直接连接到仪器&#xff0c;并用 50 Ω 将另一个输出端接地以平衡驱动电流。 这种方法的两个缺点是共模噪声没有被消除&#xff0c;这会增加本底噪声并且损失了一半的信号功率。 此外&#xff0c;如前所述&#xff0c;较弱的信号会导致热噪声的影响较大。
更好的解决方案是使用平衡-非平衡转换器巴伦将差分信号转换为单端信号&#xff0c;然后连接到相位噪声分析仪。 巴伦是一种高频变压器&#xff0c;其中差分信号连接到初级绕组的两侧&#xff0c;单端信号从次级绕组中取出。 图 4-2 说明了在单端模式&#xff08;连接到相位噪声分析仪的输出之一&#xff09;和使用 JTX-2-10T 射频变压器作为巴伦的 JTX-2-10T 射频变压器在单端模式下测量的 SiT9365 差分振荡器的相位噪声。 可以观察到&#xff0c;单端测量具有更高的本底噪声。

图 4-2&#xff1a;在单端和差分模式下测量的 SiT9365 156.25 MHz 差分振荡器的相位噪声
5 设置相位噪声分析仪
5.1 自动设置
大多数相位噪声测量仪器都具有自动设置功能。 其目的是为给定的输入信号选择最佳的仪器设置。 在 Keysight E5052B 相位噪声分析仪中使用自动设置时&#xff0c;仪器会检测输入信号的功率电平和频率&#xff0c;并自动设置多项设置&#xff0c;包括输入衰减、中频增益和频率范围。 所有其他设置&#xff0c;如开始/停止频率、平均或互相关&#xff0c;取决于测量需要&#xff0c;而不是由自动设置设置。 图 5-1 显示了使用 Keysight E5052B 分析仪使用自动设置进行的相位噪声测量。 被测信号是通过巴伦转换器连接的 SiT9365 差分振荡器。
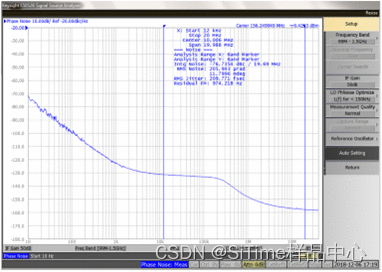
图 5-1&#xff1a;使用 Keysight E5052B 分析仪使用自动设置进行相位噪声测量。 被测信号&#xff1a;SiT9365差分振荡器通过巴伦转换器连接。
5.2 设置输入衰减
必须按照仪器供应商的建议设置输入衰减。 过多的衰减可能会将信号功率降低到热噪声开始降低本底噪声的程度。 衰减太小可能会导致电路过载和测量结果不佳。 图 5-2 说明了当输入衰减器设置从自动设置功能选择的 0 dB 更改为 20 dB 和 30 dB 时&#xff0c;相位噪声测量本底噪声如何增加。

图 5-2&#xff1a;衰减器设置对相位噪声测量的影响。 仪器&#xff1a;Keysight E5052B。 被测设备&#xff1a;SiT5356&#xff0c;156.25 MHz。
5.3 平均
大多数相位噪声分析仪都具有测量平均功能。 此功能按指定的次数运行测量并对结果求平均值。 它使相位噪声轨迹看起来更平滑&#xff0c;但需要更多的时间。
图 5-3 显示了使用 Keysight E5052B 分析测量的 SiT5356 精密 TCXO 相位噪声。 使用了两种平均设置&#xff1a;无平均和 16 倍平均。 理想情况下&#xff0c;用户应该尝试几种不同的平均设置&#xff0c;以测量速度和测量质量之间的最佳平衡。

图 5-3&#xff1a;在没有平均和 16x 平均的情况下测量的相位噪声。 仪器&#xff1a;Keysight E5052B。 被测设备&#xff1a;SiT5356&#xff0c;10 MHz。
从图 5-3 中可以看出&#xff0c;有和没有平均的轨迹都是平滑的&#xff0c;并且在远偏移量处几乎相同&#xff0c;但没有平均的轨迹在偏移量附近看起来非常“嘈杂”。这种差异主要是由于 Keysight E5052B 分析仪处理数据的方式造成的。以高采样率收集原始相位数据。在完整数据集上运行 FFT 需要大量计算资源&#xff0c;因此仪器将相位噪声图拆分为固定段。这允许对绘图段使用不同的分辨率&#xff0c;因此较低的偏移量可以具有更高的分辨率&#xff0c;而远处的偏移量可以具有较低的分辨率。这对于以对数水平刻度绘制数据非常方便。例如&#xff0c;1 Hz 到 47.7 Hz 是第一段&#xff0c;47.7 Hz 到 190.7 Hz 是下一段&#xff0c;依此类推。为了计算第一段的 FFT&#xff0c;使用原始数据的完整时间长度&#xff0c;但通过跳过样本降低了采样率。对于下一段&#xff0c;采样率高于第一段&#xff0c;但序列的持续时间减少&#xff08;参见图 5-4&#xff09;。
这种方法还有另一个好处。在图 5-4 中&#xff0c;用于计算段 4 的 FFT 的数据具有最大采样率&#xff0c;但持续时间相对较短。这意味着可以将原始相位数据集切割成多个连续的数据集&#xff0c;就像图中用于计算 FFT 的数据集一样。然后可以为每个数据集单独计算 FFT 并取平均值以获得更好的段测量结果&#xff08;图 5-5&#xff09;。在相位噪声分析仪文档中&#xff0c;这个过程被称为执行一定数量的相关&#xff0c;因为执行了多个互相关的矢量平均。 Keysight E5052 手册指定了对相位噪声图的每一段应用了多少相关性。这是仪器自动执行的附加处理&#xff0c;用户无法控制。这就是为什么使用 Keysight E5052B 分析仪测量的相位噪声迹线在较高偏移下看起来很平滑&#xff0c;但需要平均以提高偏移附近的测量质量。

图 5-4&#xff1a;相位噪声图中段的拼接
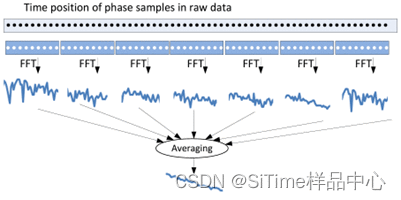
图 5-5&#xff1a;处理更高频率段有足够的数据来运行多个相关操作并平均结果
5.4 互相关
互相关是另一种改善相位噪声测量本底噪声的技术。 连接到相位噪声分析仪的被测信号被分成两个测量通道&#xff0c;由参考源和 PLL 系统组成。 在这两个通道的输出之间应用互相关。 来自被测信号的噪声是相干的&#xff0c;因此不受互相关操作的影响。 来自测量通道的噪声是非相干的&#xff0c;因此它们以 sqrt(M) 的速率通过互相关减少&#xff0c;其中 M 是相关数。

其中&#x1d441;&#x1d45a;&#x1d452;&#x1d44e;&#x1d460; 是被测噪声&#xff0c;&#x1d441;&#x1d446;&#x1d448;&#x1d447; 是被测信号中存在的噪声&#xff0c;&#x1d441;1 和&#x1d441;2 分别是测量通道1 和通道2 添加的噪声&#xff0c;而&#x1d440;是相关数。
使用互相关设置可以改善测量本底噪声。 这也是一种对相位噪声数据应用平均并平滑轨迹的方法。 缺点是测量时间显着增加。 图 5-6 说明了互相关功能如何帮助在接近偏移处获得更好的测量结果。
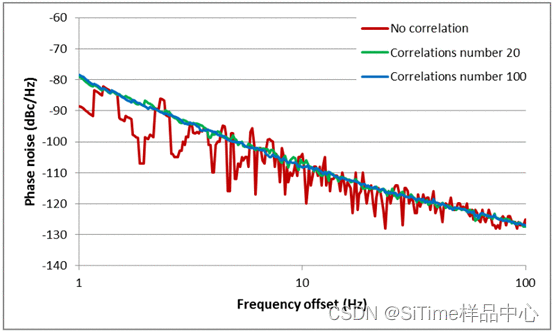
图 5-6&#xff1a;互相关对接近相位噪声的影响
5.5 相位噪声上的杂散
杂散是相位噪声频谱中的谐波分量。 在相位噪声图上&#xff0c;它们看起来像数据上的垂直尖峰。 频域中杂散的理想数学模型是 Dirac delta 函数乘以杂散幅度&#xff0c;因此无法通过以 dBc/Hz 表示的功率谱密度来准确描述杂散。 更好的杂散测量单位是 dBc。
随机噪声是无界的&#xff0c;峰峰值随着样本量的增加而增加。 确定性噪声是有界的&#xff0c;不会随着样本大小而增加。 在计算对系统性能的影响时&#xff0c;必须分别考虑随机和确定性相位噪声分量。
大多数相位噪声测量仪器都有内置算法来检测杂散并以不同的方式处理它们&#xff0c;以便将它们与随机噪声分开。 图 5-7 显示了使用 Keysight E5052B 分析仪在规范化杂散处理模式下测量的相位噪声。 在这种模式下&#xff0c;杂散与随机噪声没有区别&#xff0c;并且以与随机噪声相同的方式进行处理。 图 5-8 说明了检测杂散并将它们从图中删除的忽略模式。 图 5-9 显示了功率杂散模式下的相同相位噪声测量。 此模式检测杂散&#xff0c;将它们与随机噪声分开&#xff0c;并以 dBc 为单位表示。 它们也以与随机噪声不同的颜色显示。

图 5-7&#xff1a;在没有杂散处理的情况下测量的相位噪声&#xff08;标准化杂散模式&#xff09;。 仪器&#xff1a;Keysight E5052B。 被测设备&#xff1a;SiT9365&#xff0c;156.25 MHz。
请务必注意&#xff0c;当杂散以 dBc 为单位显示时&#xff0c;它们可能看起来很大且令人不安。 实际上&#xff0c;它们以不同的单位表示&#xff0c;无法在视觉上与随机噪声进行比较。 在抖动影响方面了解杂散值的一个好方法是将杂散从 dBc 转换为时间单位。 Keysight E5052B 分析仪具有允许导出杂散表的功能。 使用以下公式&#xff0c;可以将杂散从 dBc 转换为 fsrms&#xff1a;

其中 L(f) 是以 dBc 为单位的杂散值&#xff0c;fcarrier 是载波频率。
图 5-9 中的最大杂散约为 -100 dBc&#xff0c;这是 SiTime SiT9365 差分振荡器的典型性能。 让我们将其转换为 RMS 抖动&#xff1a;

所以支线的功率只有14.4fsrms

图 5-8&#xff1a;去除杂散后测量的相位噪声&#xff08;忽略杂散模式&#xff09;。 仪器&#xff1a;Keysight E5052B。 被测设备&#xff1a;SiT9365&#xff0c;156.25 MHz。

图 5-9&#xff1a;在检测到杂散并以 dBc 为单位显示的情况下测量的相位噪声&#xff08;功率杂散模式&#xff09;。 仪器&#xff1a;Keysight E5052B。 被测设备&#xff1a;SiT9365&#xff0c;156.25 MHz。







 京公网安备 11010802041100号
京公网安备 11010802041100号