使用Opencv实现张正友法相机标定之前,有几个问题事先要确认一下,那就是相机为什么需要标定,标定需要的输入和输出分别是哪些?
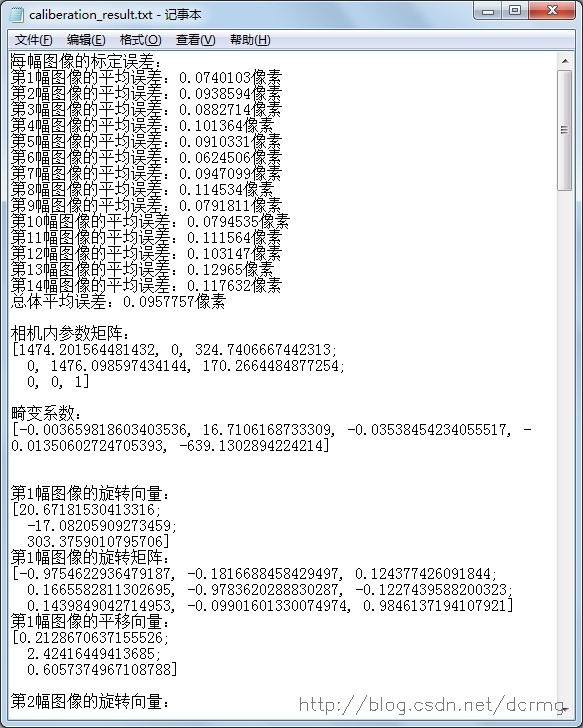
相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。
相机标定的输入:标定图像上所有内角点的图像坐标,标定板图像上所有内角点的空间三维坐标(一般情况下假定图像位于Z=0平面上)。
相机标定的输出:摄像机的内参、外参系数。
这三个基础的问题就决定了使用Opencv实现张正友法标定相机的标定流程、标定结果评价以及使用标定结果矫正原始图像的完整流程:
1. 准备标定图片
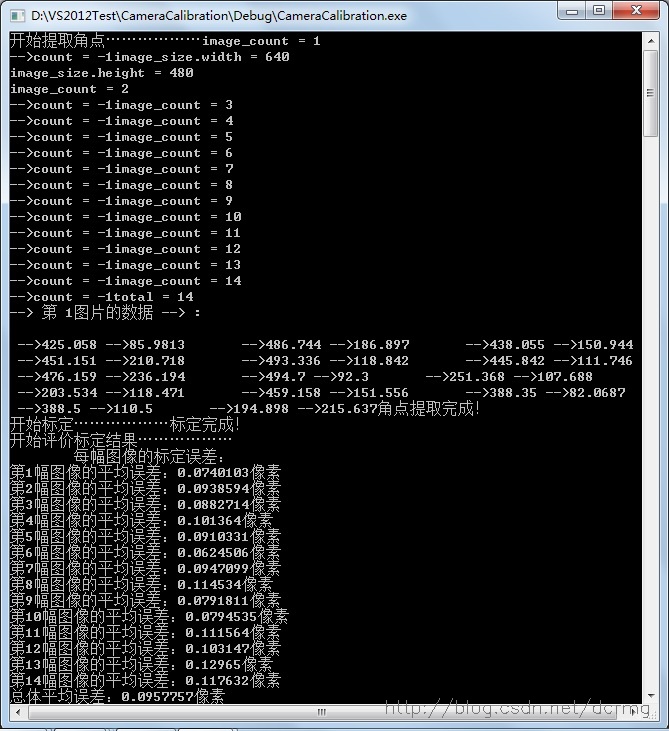
2. 对每一张标定图片,提取角点信息
3. 对每一张标定图片,进一步提取亚像素角点信息
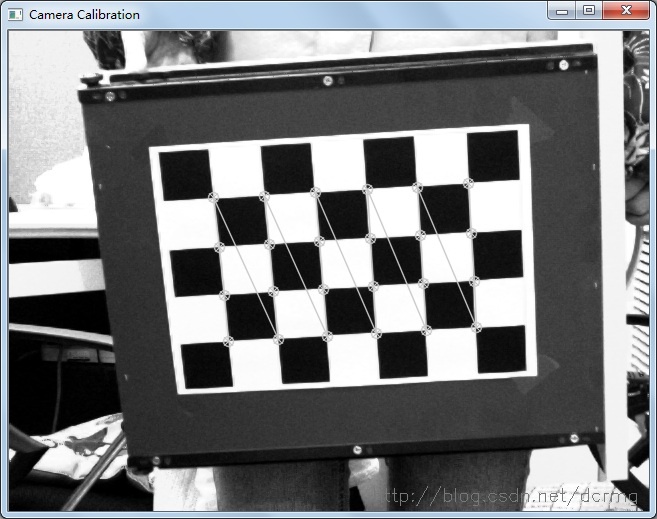
4. 在棋盘标定图上绘制找到的内角点(非必须,仅为了显示)
5. 相机标定
6. 对标定结果进行评价
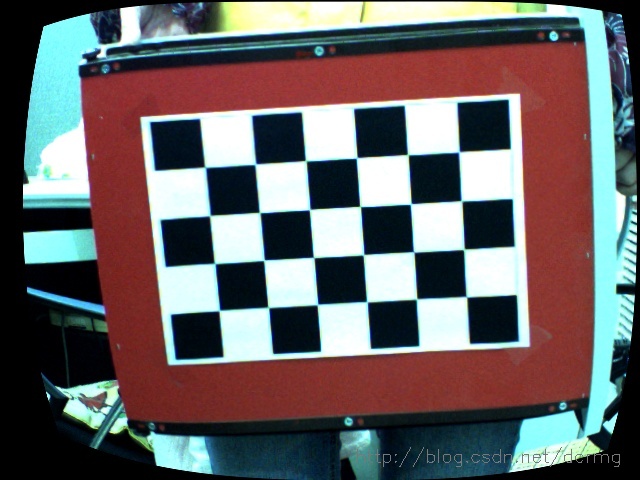
7. 查看标定效果——利用标定结果对棋盘图进行矫正
1. 准备标定图片
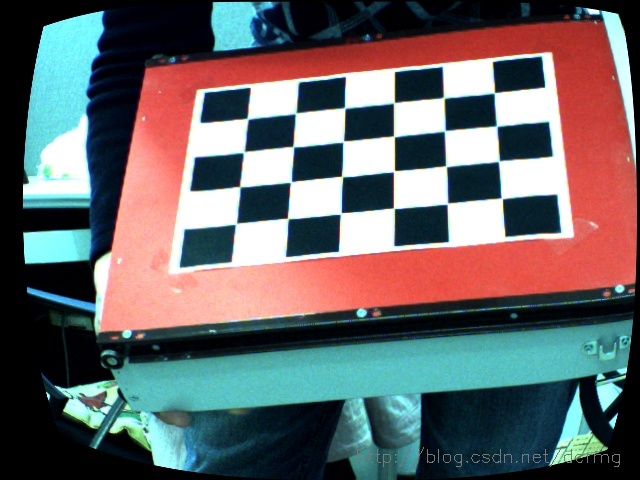
标定图片需要使用标定板在不同位置、不同角度、不同姿态下拍摄,最少需要3张,以10~20张为宜。标定板需要是黑白相间的矩形构成的棋盘图,制作精度要求较高,如下图所示:
 Mat imageSource &#61; imread(filePath); Mat newimage &#61; imageSource.clone(); remap(imageSource,newimage,mapx, mapy, INTER_LINEAR); StrStm.clear(); filePath.clear(); StrStm< StrStm>>imageFileName; imageFileName &#43;&#61; "_d.jpg"; imwrite(imageFileName,newimage); } std::cout<<"保存结束"< return ; }
Mat imageSource &#61; imread(filePath); Mat newimage &#61; imageSource.clone(); remap(imageSource,newimage,mapx, mapy, INTER_LINEAR); StrStm.clear(); filePath.clear(); StrStm< StrStm>>imageFileName; imageFileName &#43;&#61; "_d.jpg"; imwrite(imageFileName,newimage); } std::cout<<"保存结束"< return ; }
标定图例1&#xff1a; 
标定图例2&#xff1a;
标定结果1&#xff1a;
标定结果2&#xff1a;
矫正效果1&#xff1a;
矫正效果2&#xff1a;



![[译]技术公司十年经验的职场生涯回顾](https://img8.php1.cn/3cdc5/24912/711/b6574f3292f9dc00.png)



 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有