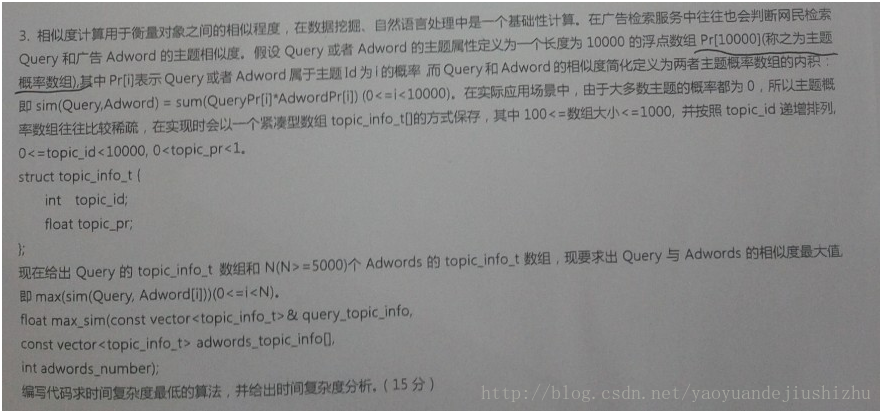
看过上回《厘清需求篇》,读者想到多少个解呢?本篇首先谈及一些基本分析,之后会按两种API设计(纯函数API和含状态的API),分别描述多个解。虽然面试时或许不能进行实际测试,但本文还是给出PC上的效能测试结果。最后分析比较各解之优劣作为总结。
原来的问题是要从一个无序ids数组里分配一个id。我们可以用数学方式去更清楚地说明这个问题。
设m = 256 为所有id的个数,集合U = \left\{ 0, 1, ..., m-1 \right\}为所有id的集合。那么,给定一个已分配id的集合A\subset U,A = \left\{ a_0, a_1, ..., a_{n-1} \right\}(即参数ids),本题目可表示为,求一个x(即传回的id),符合条件:
减号是补集的意思,即x属于U但不属于A。上回的对答已确定U - A\ne \oslash ,即x必然存在。此外,这个条件又可以写成:
以上两种表达式可说明此问题的两种解法,一种编程方向是查找U集里有没有不属于A的id,而另种是计算A的补集再取出其中一个id。
实现程序之前,如果可以,应先写测试函数。笔者认为,若面试者在情况容许下,也可在解答题目之前,写下测试程序。如果有多个面试者能同样解题,或许同时写下测试程序的面试者能脱颖而出。
为了简单起见,笔者使用了assert()来检测正确性,只于Debug版本有效。而Release版本则用来测试效能。
由于U集合的子集合很多,\left| P(U) \right| = 2^m=2^{256}\approx 10^{76} ,不可能穷举所有可能集合。所以,只能够举出随机的集合以作测试。
以下是一些常数(宏)及类型声明,TEST_COUNT是测试次数,而TEST_REPEATCOUNT是为了测试效能时,重覆测试的次数(即Release版本会调用测试函数一百万次):
#define M 256 // ID的数目,且所有ID在[0, M)的区间内
#define TEST_COUNT 10000
#ifdef NDEBUG
#define TEST_REPEATCOUNT 100
#else
#define TEST_REPEATCOUNT 1
#endif
typedef unsigned char byte;
typedef unsigned long dword;
typedef byte (*idalloc_func)(byte*, size_t);
首先,写一个帮助函数测试某id是否在ids集合之内(不熟C++的读者可参考C版本):
// 检测ids里是否含id (C++ 版本)
inline bool contain(byte* ids, size_t n, byte id) {
assert(ids != NULL);
return find(ids, ids + n, id) != ids + n;
}
// 检测ids里是否含id (C 版本)
inline bool contain(byte* ids, size_t n, byte id) {
assert(ids != NULL);
for (size_t i = 0; i
return true;
return false;
}
笔者首先写了一个测试平均情况的测试平台函数:
// 测试平均情况
void test_average(idalloc_func idalloc) {
assert(idalloc != NULL);
byte ids[M];
for (size_t i = 0 ; i
srand(0); // 使每次测试的伪随机数相同
size_t n = 0;
for (int test = 0; test
for (int repeat = 0; repeat
(void)id;
assert(!contain(ids, n, id));
// 测试是否最小的id
for (size_t i = 0; i
}
n = (n + 1) % M;
}
}
简单解释。首先,把ids数组填入所有id值。利用random_shuffle()把把整个ids数组洗牌,而n则是在[0, M)区间里循环递增。
由于笔者给出的解,都能传回最小的id,所以也会测试这条件。而最坏情况,就是ids含无序的{0, 1, ... M - 2},分配到的id为M-1,笔者也为此编了一个最坏情况的效能测试函数。
// 测试最坏情况(ids为无序的[0, M - 2], 结果必然是id = M - 1)
void test_worst(idalloc_func idalloc) {
assert(idalloc != NULL);
const size_t n = M - 1;
byte ids[n];
srand(0); // 使每次测试的伪随机数相同
for (size_t i = 0 ; i
for (int test = 0; test
for (int repeat = 0; repeat
(void)id;
assert(id == M - 1);
}
}
}
最简单的想法,可能是遍历所整个U集合(即0至M-1),并使用contain()函数检测该id是否不包含在ids数组里。
// 线性查找 (总是传回最小id)
// 时间复杂度: O(n^2)
// 临时内存大小: 0 字节
// 注: 因为n
assert(ids != NULL);
assert(n
for (byte id = 0; ; id++)
if (!contain(ids, n, id))
return id;
}
网友Doyle在TL里提出了用二分查找的主意。笔者实现了两种形式,以下这个是不需额外内存。原理是把U集合分割为两个各占一半的区间,分别数算两个区间内的已分配元素数目,若元素数目少于区间大小,即代表该区间内有未分配的id。再继续分割该区间,直至区间内都是可分配的id(即找到的元素是零)。
// 数ids内有多少个id在[min, max)的区间内
inline size_t count_interval(byte* ids, size_t n, size_t min, size_t max) {
size_t count = 0;
for (size_t i = 0; i
return count;
}
// 二分查找 (总是传回最小id)
// 时间复杂度: O(n lg n)
// 临时内存大小: 0 字节
byte binary_search(byte* ids, size_t n) {
assert(ids != NULL);
assert(n
for(;;) {
size_t c = (l + r) / 2; // 把id范围从[l, r)分割为[l, c), [c, r)两个区间
size_t count;
// 以下的条件测试次序保证了传回最小id
if ((count = count_interval(ids, n, l, c))
return (byte)l;
r = c;
}
else if ((count = count_interval(ids, n, c, r))
return (byte)c;
l = c;
}
else
assert(false); // 因为n
}
这算法在最坏情况比线性查找快,但平均情况下却不一定。
以上两个解,都是查找的方式,毋需改动数据。相反,另一类解用的算法需改动ids数组内的元素,或是把ids复制到另一个临时数组里进行更改型的算法。
最简单的算法,是把无序的ids排序。之后就可以从头开始扫描未分配的id。
// 排序 (总是传回最小id)
// 时间复杂度: O(n lg n)
// 临时内存大小: M 字节(如果可改变ids则是0)
byte sort_stl(byte* ids, size_t n) {
assert(ids != NULL);
assert(n
memcpy(buffer, ids, n);
sort(buffer, buffer + n); // 平均 O(n lg n)
for (size_t i = 0; i
return (byte)i;
return (byte)n;
}
但读者可能会想到,把整个数组排序可能会做了很多无用工。而且,快速排序(quicksort)的最坏时间复杂度是O(n^2)。因此,就有了下一个解。
笔者想到的另一个解是使用堆(heap)数据结构。堆可保证第一个元素是最小的元素(通常是最大的,但这题目里我们希望取得最小的),而每次弹出这个元素,取出第二小的元素只需要O(lg n)的时间。 sort_stl()需要完整排序,而使用堆则是逐步进行的,中途找到没用到的id就可以停下来,所以平均来说会省下很多时间。
// 堆 (总是传回最小id)
// 时间复杂度: O(n lg n)
// 临时内存大小: M 字节(如果可改变ids则是0)
byte heap_stl(byte* ids, size_t n) {
assert(ids != NULL);
assert(n
memcpy(buffer, ids, n);
byte* end = buffer + n;
make_heap(buffer, end, greater()); // O(n)
for (byte id = 0; buffer != end; id++, end--) {
if (buffer[0] != id)
return id;
pop_heap(buffer, end, greater()); // O(lg n)
}
return (byte)n;
}
最坏的情况,是要把最小的M-1个元素最弹出,才能求得id=M-1。这情况其实等价于堆排序(heapsort)。
另一个方法和二分查找相似,就是把数组剖分(partition)为两部分,这应该是Doyle提出的原意。原理是,设一个中间c=M/2,用它把无序ids集合剖分为两个无序集合,前一个集合的元素小于c,后一个的元素大于或等于c。那么,应该有一个集合的元素数量少于id区间的大小,再把该集合继续剖分,直至变成空集。
// 剖分 (总是传回最小id)
// 时间复杂度: O(n)
// 临时内存大小: M 字节(如果可改变ids则是0)
byte partition_stl(byte* ids, size_t n) {
assert(ids != NULL);
assert(n
memcpy(buffer, ids, n);
byte *first = buffer, *last = buffer + n;
size_t l = 0, r = M;
for (;;) {
size_t c = (l + r) / 2;
byte* middle = partition(first, last, bind2nd(less(), c)); // O(n)
// 后置条件: l <&#61; [first, middle)内元素
if (first &#61;&#61; middle)
return (byte)l;
else if ((size_t)distance(first, middle)
r &#61; c;
}
else if (middle &#61;&#61; last)
return (byte)c;
else if ((size_t)distance(middle, last)
l &#61; c;
}
else
assert(false);
}
}
此算法的妙处在于&#xff0c;时间复杂度仅为O(n)&#xff01;为什么呢&#xff1f;因为partition()的时间复杂度是O(n)&#xff0c;而此算法中每个迭代需处理的元素是n, n/2, n/4, ...&#xff0c;把这个几何数列求和&#xff0c;得出2n&#xff0c;所以此算法为线性时间。
也许&#xff0c;最多网友都想到的解&#xff0c;就是把ids无序数组变换为另一个集合表示方式&#xff0c;能更快地测试A是否不含某id。这种表达方式是使用一个布尔数组(boolean array)&#xff0c;储存某id是否在ids无序数组里。用数学方式&#xff0c;可以称这个数组为一个函数f:U\rightarrow \{0,1\}:
建立这个数组之后&#xff0c;再扫描一次&#xff0c;找出没使用到的id。
// 布尔集合 (总是传回最小id)
// 时间复杂度: O(n)
// 临时内存大小: M 字节
byte boolset(byte* ids, size_t n) {
assert(ids !&#61; NULL);
assert(n
// 填充 id_used
for (size_t i &#61; 0; i
id_used[ids[i]] &#61; true;
}
// 扫描id_used去找出最小未用id
for (size_t i &#61; 0; i
return (byte)i;
assert(false);
return 0;
}
这类解法在纯函数API中是最快的&#xff0c;但必须使用额外内存。
上述的解&#xff0c;每个数组元素由于只需储存1个位(bit)&#xff0c;可以把8个布尔值置于字节里&#xff0c;减少额外内存。这种集合称为位集合(bit set)或位图(bitmap)。此外&#xff0c;在32位CPU上&#xff0c;可一次检查32位是否全0或全1&#xff0c;这可是一个优化。这次&#xff0c;我们直接储存补集A&#xff0c;即是那些分配了的id会把位设为0&#xff0c;那么在扫描时就不需做一个not位元运算。
// 位集合 (总是传回最小id)
// 时间复杂度: O(n)
// 临时内存大小: floor((M &#43; 31) / 32) * 4 字节
byte bitset_standard(byte* ids, size_t n) {
assert(ids !&#61; NULL);
assert(n
dword id_unused_bits[dword_count];
// 开始时设全部id为未用(即设位为1)
memset(id_unused_bits, ~0, sizeof(id_unused_bits));
// 填充id_unused_bits (ids内的位清为0)
for (size_t i &#61; 0; i
dword bitIndex &#61; ids[i] % 32;
assert(id_unused_bits[index] & (1 <
// 扫描id_unused_bits&#xff0c;找出最小未用id
for (size_t index &#61; 0; index
for (dword bitIndex &#61; 0; bitIndex <32; bitIndex&#43;&#43;)
if (bits & (1 <
assert(id
}
}
}
assert(false);
return 0;
}
在某些CPU上&#xff0c;还会支持一个汇编指令bsf(bit scan forward)&#xff0c;可扫描一个32位值里&#xff0c;第一个为1的位索引(从LSB至MSB)。这正正是我们想要的。以下使用了Visual C&#43;&#43;的内部函数(intrinsic)去使用此指令。
// 位集合(使用内部函数(intrinsic))
byte bitset_intrinsic(byte* ids, size_t n) {
assert(ids !&#61; NULL);
assert(n
dword id_unused_bits[dword_count];
// 开始时设全部id为未用(即设位为1)
memset(id_unused_bits, ~0, sizeof(id_unused_bits));
// 填充id_unused_bits (ids内的位清为0)
for (size_t i &#61; 0; i
dword bitIndex &#61; ids[i] % 32;
assert(id_unused_bits[index] & (1 <
// 扫描id_unused_bits&#xff0c;找出最小未用id
for (size_t index &#61; 0; index
if (_BitScanForward(&bitIndex, id_unused_bits[index])) {
dword id &#61; index * 32 &#43; bitIndex;
assert(id
}
}
assert(false);
return 0;
}
由于建立位集合所需的操作较布尔集合多&#xff0c;扫描的优化未必能弥补&#xff0c;所以位集合的主要好处是减低了临时内存的大小&#xff0c;为布尔集合的八分之一。
笔者对此题目提出另一种API的设计&#xff0c;就是保存一些状态:
struct manager {
// 这里有一些状态变量(暂未决定)
byte alloc();
void dealloc(byte id);
};
而在工程上&#xff0c;我们都可以估计到&#xff0c;传给纯函数API的ids数组&#xff0c;其内容实际上是以某方式储存在系统内的。若能改善它们储存的方式&#xff0c;就能加速id的分配过程。
同样&#xff0c;笔者为此API设计编写了测试函数。纯函数API的测试函数每次都是独立调用&#xff0c;但本测试的对象是有状态的。因此&#xff0c;此函数设计为随机分配为释放id(各概率约为50%)。
template
void test_manager() {
T manager;
bool id_allocated[M] &#61; { false };
byte allocated_ids[M]; // allocated_ids[0]至allocated_ids[id_used_count - 1]储存无序的已分配id
size_t allocated_id_count &#61; 0;
srand(0); // 使每次测试的伪随机数相同
for (int test &#61; 0; test
if (allocated_id_count &#61;&#61; 0 || (rand() > RAND_MAX / 2 && allocated_id_count
assert(!id_allocated[id]);
id_allocated[id] &#61; true;
allocated_ids[allocated_id_count&#43;&#43;] &#61; id;
}
else {
// 其他情况&#xff0c;随机抽一个已分配id进行释放
assert(allocated_id_count > 0);
size_t index &#61; rand() % allocated_id_count;
byte id &#61; allocated_ids[index];
assert(id_allocated[id]);
manager.dealloc(id);
id_allocated[id] &#61; false;
allocated_ids[index] &#61; allocated_ids[--allocated_id_count]; // 用列表末的id取代已释放的id
}
}
}
此外&#xff0c;这个测试函数不使用O(n)的contain()&#xff0c;所有操作都是O(1)的&#xff0c;测试的开销比较少。
首先的解是把之前的布尔集合储存为状态&#xff0c;那么就不用每次重新建立该集合。
// 布尔集合 (总是传回最小id)
// 分配的时间复杂度: O(n)
// 释放的时间复杂度: O(1)
// 状态所需内存: M 字节
struct boolset_manager {
bool id_used[M];
boolset_manager() {
for (size_t i &#61; 0; i
}
byte alloc() {
for (size_t i &#61; 0; i
id_used[i] &#61; true;
return (byte)i;
}
}
assert(0);
return false;
}
void dealloc(byte id) {
assert(id_used[id]);
id_used[id] &#61; false;
}
};
当然&#xff0c;亦可以用位集合减少内存。此处就不再详述了。
这个解可以传回最小id&#xff0c;但若是没此需要&#xff0c;则有更快的解。
笔者认为&#xff0c;以下这个采用栈(stack)的解可能是本文最简单的一个解&#xff0c;同时&#xff0c;它的分配和释放时间复杂度皆是O(1)&#xff0c;而且系数应为最低&#xff0c;所以是本文最高效的解。
其原理很简单&#xff0c;把整个U集合压入栈&#xff0c;分配的时候弹出一个id&#xff0c;释放的时候压回去。
// 栈
// 分配的时间复杂度: O(1)
// 释放的时间复杂度: O(1)
// 状态所需内存: M &#43; 4 字节(使用short top会是M &#43; 2 字节)
struct stack_manager {
byte ids[M];
size_t top;
stack_manager() : top(M) {
for (size_t i &#61; 0; i
}
byte alloc() {
assert(top > 0);
return ids[--top]; // 弹出
}
void dealloc(byte id) {
assert(top
}
};
而另一个接近高效的解是Qiaojie提出的&#xff0c;把数组当作链表。这个解的分配和释放时间复杂度亦是O(1)。
// 数组链表 (来自qiaojie)
// 分配的时间复杂度: O(1)
// 释放的时间复杂度: O(1)
// 状态所需内存: M &#43; 1 字节(若以freelist形式储存&#xff0c;则所需额外内存只是1字节)
struct arraylinkedlist_manager {
byte next[M];
byte head;
arraylinkedlist_manager() : head(0) {
// 填入完整的环
for(int i &#61; 0; i
}
byte alloc() {
byte id &#61; head;
head &#61; next[head];
// next[id]在这里已经不需要&#xff0c;可以用来放短讯或其他数据&#xff0c;这里放置0作为测试。实际上这步是可有可无的。
next[id] &#61; 0;
return id;
}
void dealloc(byte id) {
next[id] &#61; head;
head &#61; id;
}
};
这个解其实可称为free list&#xff0c;其优点是&#xff0c;next数组的元素若被分配&#xff0c;则本身可以储存其他数据。所以实际上会占用的额外内存只是1个字节&#xff01;例如&#xff0c;可以把短讯的结构定义为:
// 用于数组链表的freelist的结构例子
union sms {
byte next;
char message[160];
};
此数据结构其实最适合做对象池(object pool)。
以下是在i7 920、Windows 7、Visual C&#43;&#43; 2008 x86模式下的结果(单位为秒):
0.068476 test_average(dummy)
0.545491 test_average(linear_search)
3.030943 test_average(binary_search)
4.209131 test_average(sort_stl)
0.966749 test_average(heap_stl)
0.424917 test_average(partition_stl)
0.208690 test_average(boolset)
0.272523 test_average(bitset_standard)
0.271665 test_average(bitset_intrinsic)
0.068385 test_worst(dummy)
27.025864 test_worst(linear_search)
11.407150 test_worst(binary_search)
10.122118 test_worst(sort_stl)
13.912083 test_worst(heap_stl)
0.887030 test_worst(partition_stl)
0.498429 test_worst(boolset)
0.570213 test_worst(bitset_standard)
0.458865 test_worst(bitset_intrinsic)
0.042507 test_manager()
0.073745 test_manager()
0.042462 test_manager()
0.042526 test_manager()
当中&#xff0c;dummy/dummy_manager为没有实际计算的测试对象&#xff0c;用以量度测试本身的开销。读者比较时可把测试的时间减去相对的开销。
以下的表简单总括各个解的特性:
| 解 | 传回最小id | 平均时间复杂度 | 额外内存(字节) |
| 线性查找 | 是 | O(n^2) | 0 |
| 二分查找 | 是 | O(n lg n) | 0 |
| 排序 | 是 | O(n lg n) (最坏O(n^2)) | m 或0(可改动ids) |
| 堆 | 是 | O(n lg n) | m 或0(可改动ids) |
| 剖分 | 是 | O(n) | m 或0(可改动ids) |
| 布尔集合 | 是 | O(n) | m |
| 位集合 | 是 | O(n) | floor((m&#43;31)/32)*4 |
| 布尔集合(含状态) | 是 | O(n), O(1) | m |
| 位集合(含状态) | 是 | O(n), O(1) | floor((m&#43;31)/32)*4 |
| 栈 | 否 | O(1), O(1) | m &#43; 4 或m &#43; 2 |
| 数组链表 | 否 | O(1), O(1) | m &#43; 1 或1 |
原题目中的需求中谈及「……我要求你的程序尽量快&#xff0c;并少用内存。」但时间和空间是两个互相竞争的需求&#xff0c;通常难以同时满足。而在上文中&#xff0c;也把问题的API需求细分为:
本文列出的解并没有各方面都完美的解。例如&#xff0c;在无需额外内存的纯函数解里&#xff0c;二分查找在最坏情况下比线性查找的性能好&#xff0c;但平均来说却是相反。
在变动数组(或复制数组)的纯函数解里&#xff0c;剖分在平均和最坏情况下&#xff0c;性能都比排序和堆好。剖分的优点是可以不占内存(当能改动ids时)&#xff0c;性能又比查找好。
布尔集合和位集合的性能在纯函数解里是最好的&#xff0c;但必须占一些内存(虽然当m&#61;256&#xff0c;位集合只需32字节)。
含状态的解中&#xff0c;若需要传回最小id&#xff0c;可使用布尔集合和位集合。不然&#xff0c;可采用栈和数组链表。若在数组链表中以free list使用&#xff0c;当然是最理想&#xff0c;因为这只占1字节。但栈的性能会好一点点。
个人认为&#xff0c;本题是一个不错的面试题目&#xff0c;因为它并没有一个各方面都完美的解。这样&#xff0c;更可以考验应试者对算法的基础知识和编程能力。当然&#xff0c;笔者在编写这些程序也花了多个小时&#xff0c;在有限的面试时间中不太可能写这么多。但也可以用简单文字描述&#xff0c;或在交流中讲解一些思考方向。个人认为&#xff0c;理想的工程人员不但能解决问题&#xff0c;还会知道有其他解的存在&#xff0c;并去实验、分析、选择最适合某场合的解。
如果读者也想到其他的解&#xff0c;或对上述解的改善&#xff0c;希望不吝告之&#xff0c;本人也会尽量整理于此。
下载源文件




 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有