基于韦东山视频用于QT6410
poll机制分析
韦东山2009.12.10
所有的系统调用,基于都可以在它的名字前加上“sys_”前缀,这就是它在内核中对应的函数。比如系统调用open、read、write、poll,与之对应的内核函数为:sys_open、sys_read、sys_write、sys_poll。
一、内核框架:
对于系统调用poll或select,它们对应的内核函数都是sys_poll。分析sys_poll,即可理解poll机制。
1. sys_poll函数位于fs/select.c文件中,代码如下:
asmlinkagelong sys_poll(struct pollfd __user *ufds, unsigned int nfds,
long timeout_msecs)
{
s64 timeout_jiffies;
if (timeout_msecs > 0) {
#ifHZ > 1000
/* We can only overflow if HZ >1000 */
if (timeout_msecs / 1000 >(s64)0x7fffffffffffffffULL / (s64)HZ)
timeout_jiffies = -1;
else
#endif
timeout_jiffies =msecs_to_jiffies(timeout_msecs);
} else {
/* Infinite (<0) or no (0)timeout */
timeout_jiffies = timeout_msecs;
}
return do_sys_poll(ufds,nfds, &timeout_jiffies);
}
它对超时参数稍作处理后,直接调用do_sys_poll。
2. do_sys_poll函数也位于位于fs/select.c文件中,我们忽略其他代码:
intdo_sys_poll(struct pollfd __user *ufds, unsigned int nfds, s64 *timeout)
{
……
poll_initwait(&table);
……
fdcount = do_poll(nfds, head,&table, timeout);
……
}
poll_initwait函数非常简单,它初始化一个poll_wqueues变量table:
poll_initwait> init_poll_funcptr(&pwq->pt, __pollwait); > pt->qproc = qproc;
即table->pt->qproc=__pollwait,__pollwait将在驱动的poll函数里用到。
3. do_sys_poll函数位于fs/select.c文件中,代码如下:
static int do_poll(unsigned int nfds, struct poll_list *list,
struct poll_wqueues *wait, s64 *timeout)
{
01……
02 for (;;){
03……
04 if(do_pollfd(pfd, pt)) {
05 count++;
06 pt = NULL;
07 }
08……
09 if(count || !*timeout || signal_pending(current))
10 break;
11 count= wait->error;
12 if(count)
13 break;
14
15 if(*timeout <0) {
16 /*Wait indefinitely */
17 __timeout= MAX_SCHEDULE_TIMEOUT;
18 }else if (unlikely(*timeout >= (s64)MAX_SCHEDULE_TIMEOUT-1)) {
19 /*
20 * Wait for longer than MAX_SCHEDULE_TIMEOUT. Do it in
21 * a loop
22 */
23 __timeout= MAX_SCHEDULE_TIMEOUT - 1;
24 *timeout-= __timeout;
25 }else {
26 __timeout= *timeout;
27 *timeout= 0;
28 }
29
30 __timeout= schedule_timeout(__timeout);
31 if(*timeout >= 0)
32 *timeout+= __timeout;
33 }
34 __set_current_state(TASK_RUNNING);
35 returncount;
36 }
分析其中的代码,可以发现,它的作用如下:
① 从02行可以知道,这是个循环,它退出的条件为:
a. 09行的3个条件之一(count非0,超时、有信号等待处理)
count非0表示04行的do_pollfd至少有一个成功。
b. 11、12行:发生错误
② 重点在do_pollfd函数,后面再分析
③ 第30行,让本进程休眠一段时间,注意:应用程序执行poll调用后,如果①②的条件不满足,进程就会进入休眠。那么,谁唤醒呢?除了休眠到指定时间被系统唤醒外,还可以被驱动程序唤醒──记住这点,这就是为什么驱动的poll里要调用poll_wait的原因,后面分析。
4. do_pollfd函数位于fs/select.c文件中,代码如下:
static inline unsigned int do_pollfd(struct pollfd*pollfd, poll_table *pwait)
{
……
if(file->f_op && file->f_op->poll)
mask= file->f_op->poll(file, pwait);
……
}
可见,它就是调用我们的驱动程序里注册的poll函数。
二、驱动程序:
驱动程序里与poll相关的地方有两处:一是构造file_operation结构时,要定义自己的poll函数。二是通过poll_wait来调用上面说到的__pollwait函数,pollwait的代码如下:
staticinline void poll_wait(struct file * filp, wait_queue_head_t * wait_address,poll_table *p)
{
if (p && wait_address)
p->qproc(filp, wait_address, p);
}
p->qproc就是__pollwait函数,从它的代码可知,它只是把当前进程挂入我们驱动程序里定义的一个队列里而已。它的代码如下:
staticvoid __pollwait(struct file *filp, wait_queue_head_t *wait_address,
poll_table *p)
{
struct poll_table_entry *entry =poll_get_entry(p);
if (!entry)
return;
get_file(filp);
entry->filp = filp;
entry->wait_address = wait_address;
init_waitqueue_entry(&entry->wait,current);
add_wait_queue(wait_address,&entry->wait);
}
执行到驱动程序的poll_wait函数时,进程并没有休眠,我们的驱动程序里实现的poll函数是不会引起休眠的。让进程进入休眠,是前面分析的do_sys_poll函数的30行“__timeout = schedule_timeout(__timeout)”。
poll_wait只是把本进程挂入某个队列,应用程序调用poll > sys_poll> do_sys_poll > poll_initwait,do_poll > do_pollfd >我们自己写的poll函数后,再调用schedule_timeout进入休眠。如果我们的驱动程序发现情况就绪,可以把这个队列上挂着的进程唤醒。可见,poll_wait的作用,只是为了让驱动程序能找到要唤醒的进程。即使不用poll_wait,我们的程序也有机会被唤醒:chedule_timeout(__timeout),只是要休眠__time_out这段时间。
现在来总结一下poll机制:
1. poll > sys_poll > do_sys_poll >poll_initwait,poll_initwait函数注册一下回调函数__pollwait,它就是我们的驱动程序执行poll_wait时,真正被调用的函数。
2.接下来执行file->f_op->poll,即我们驱动程序里自己实现的poll函数
它会调用poll_wait把自己挂入某个队列,这个队列也是我们的驱动自己定义的;
它还判断一下设备是否就绪。
3.如果设备未就绪,do_sys_poll里会让进程休眠一定时间
4.进程被唤醒的条件有2:一是上面说的“一定时间”到了,二是被驱动程序唤醒。驱动程序发现条件就绪时,就把“某个队列”上挂着的进程唤醒,这个队列,就是前面通过poll_wait把本进程挂过去的队列。
5.如果驱动程序没有去唤醒进程,那么chedule_timeout(__timeou)超时后,会重复2、3动作,直到应用程序的poll调用传入的时间到达。
简化过程:
应用程序调用poll,内核调用sys_poll
app:poll
kernel:sys_poll
do_sys_poll(....,timeout_jiffies)
poll_initwait(&table);
init_poll_funcptr(&pwq->pt,__pollwait); >talb->qproc=__pollwait
do_poll(nfds,head,&table,timeout)
for(;;)
{
for(;pfd != pfd_end;pfd ++){//查询多个驱动
if(do_pollfd(pfd,pt)){ >mask = file->f_op->poll(file,pwait);return mask;
//驱动的poll:
__pollwait(filp,&button_waitq);
把当前进程挂到button_waitq队列里去
count++;//如果驱动的poll返回非0值,那么count++
pt = NULL;
}
}
//break的条件:count非0,超时,有信号在等待
if(count || !*timeout || signal_pending(current))
break;
//休眠__timeout
__timeout = schedule_timeout(__timeout);
}
代码:
forth_drv.c
/*
*功能:中断驱动,在按键驱动基础上修改,原理图见按键驱动,增加poll机制
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
//#include
//#include
#include
#include
#include
#include
int major;
const char *major_name = "forth_drv";
const char *minor_name = "button";
static struct class *forthdrv_class;
static struct class_device *forthdrv_class_dev;
volatile unsigned long *gpncon = NULL;
volatile unsigned long *gpndat = NULL;
//声明一个按键的等待队列
static DECLARE_WAIT_QUEUE_HEAD(button_waitq);
/* 中断事件标志, 中断服务程序将它置1,forth_drv_read将它清0 */
static volatile int ev_press = 0;
struct pin_desc{
unsigned int pin;
unsigned int key_val;
};
/* 键值: 按下时, 0x01, 0x02, 0x03, 0x04 */
/* 键值: 松开时, 0x81, 0x82, 0x83, 0x84 */
static unsigned char key_val;
/*
* K1,K2,K3,K4对应GPN0,GPGN1,GPN2,GPN3
*/
/*
struct pin_desc pins_desc[4] = {
{S3C64XX_GPN0_EINT0, 0x01},
{S3C64XX_GPN1_EINT1, 0x02},
{S3C64XX_GPN2_EINT2, 0x03},
{S3C64XX_GPN3_EINT3, 0x04},
};
struct pin_desc pins_desc[4] = {
{0, 0x01},
{1, 0x02},
{2, 0x03},
{3, 0x04},
};
*/
struct pin_desc pins_desc[4] = {
{S3C64XX_GPN(0), 0x01},
{S3C64XX_GPN(1), 0x02},
{S3C64XX_GPN(2), 0x03},
{S3C64XX_GPN(3), 0x04},
};
/*
* 确定按键值
*中断处理程序,并置标志位为1,唤醒等待队列上等待的进程,注册用户中断处理函数,设置触发方式为双边沿触发
*/
static irqreturn_t button_irq(int irq,void *dev_id)
{
struct pin_desc * pindesc = (struct pin_desc *)dev_id;
unsigned int pinval;
//pinval = ioread32(S3C64XX_GPNDAT);
//pinval = gpio_get_value(S3C64XX_GPN(pindesc->pin));/* 读取中断引脚的状态 */
pinval = gpio_get_value(pindesc->pin);/* 读取中断引脚的状态 */
/* 确定按键值 */
if (pinval)
{
/* 松开 */
key_val = 0x80 | pindesc->key_val;
}
else
{
/* 按下 */
key_val = pindesc->key_val;
}
ev_press = 1; /* 表示中断发生了 */
wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程 */
return IRQ_RETVAL(IRQ_HANDLED);
}
/* open函数 */
static int forth_drv_open(struct inode *inode,struct file *file)
{
/* 配置GPN0、1、2、3为输入(配置为0) */
//*gpncon &=~((0x3<<(0*2)) | (0x3<<(1*2)) | (0x3<<(2*2)) | (0x3<<(3*2)));//清零寄存器
request_irq(IRQ_EINT(0),button_irq,IRQ_TYPE_EDGE_BOTH,"K1",&pins_desc[0]);
request_irq(IRQ_EINT(1),button_irq,IRQ_TYPE_EDGE_BOTH,"K2",&pins_desc[1]);
request_irq(IRQ_EINT(2),button_irq,IRQ_TYPE_EDGE_BOTH,"K3",&pins_desc[2]);
request_irq(IRQ_EINT(3),button_irq,IRQ_TYPE_EDGE_BOTH,"K4",&pins_desc[3]);
//request_irq(IRQ_EINT(4),button_irq,IRQ_TYPE_EDGE_BOTH,"K4",1);
return 0;
}
/* read函数 */
static ssize_t forth_drv_read(struct file *file,char __user *buf,size_t size,loff_t *ppos)
{
if(size != 1)
return -EINVAL;
/* 如果没有按键动作, 休眠 */
wait_event_interruptible(button_waitq, ev_press);
/* 如果有按键动作, 返回键值 */
copy_to_user(buf, &key_val, 1);
ev_press = 0;//重新清0
return 1;
}
static unsigned forth_drv_poll(struct file *file,poll_table *wait)
{
unsigned int mask = 0;
/* 不会立即休眠 只是将进程挂到key_waitq队列, 并不会休眠 */
poll_wait(file,&button_waitq,wait);
if(ev_press)//如果没有中断产生
mask |= POLLIN | POLLRDNORM;
//printk("\t*******************\n\tpoll\n\t***********************\n");
return mask;
}
//主要是卸载用户中断处理程序
int forth_drv_close(struct inode* inode,struct file* file)
{
free_irq(IRQ_EINT(0),&pins_desc[0]);
free_irq(IRQ_EINT(1),&pins_desc[1]);
free_irq(IRQ_EINT(2),&pins_desc[2]);
free_irq(IRQ_EINT(3),&pins_desc[3]);
return 0;
}
/* 结构体 */
static struct file_operations forth_drv_fops={
.owner = THIS_MODULE,/* 这是一个宏,推向编译模块时自动创建到__this_module变量 */
.open = forth_drv_open,
.read = forth_drv_read,
.release = forth_drv_close,
.poll = forth_drv_poll,
};
/* 入口函数 */
static int forth_drv_init(void)
{
major = register_chrdev(0,major_name,&forth_drv_fops);
if(major <0)
{
printk("Can't register major number\n");
return major;
}
/* 自动生成设备节点机制,获取系统消息,cat /proc/class会发现 first_drv */
forthdrv_class = class_create(THIS_MODULE, major_name);
/* register your own device in sysfs, and this will cause udev to create corresponding device node */
forthdrv_class_dev = device_create( forthdrv_class, NULL, MKDEV(major, 0),NULL, minor_name );
/* 地址映射 */
gpncon = (volatile unsigned long *)ioremap(0x7F008830,16);
gpndat = gpncon + 1;//指针加1
return 0;
}
/* 出口函数 */
static void forth_drv_exit(void)
{
unregister_chrdev(major,major_name);
device_unregister(forthdrv_class_dev);
class_destroy(forthdrv_class);
iounmap(gpncon);
}
module_init(forth_drv_init);
module_exit(forth_drv_exit);
MODULE_LICENSE("GPL");
Makefile:
obj-m := forth_drv.o
KER_DIR := /work/work/linux/
all:
$(MAKE) -C $(KER_DIR) M=`pwd` modules
#cp first_drv.ko /work/tftpboot/
cp forth_drv.ko /work/nfsroot/
echo $^
clean:
make -C $(KER_DIR) M=`pwd` modules clean
test.c
/*
*功能:在一定时间内没有按键中断,也返回
*/
#include
#include
#include
#include
#include
/*test
*/
int main(int argc,char *argv[])
{
int fd;
int ret ;
char key_vals;
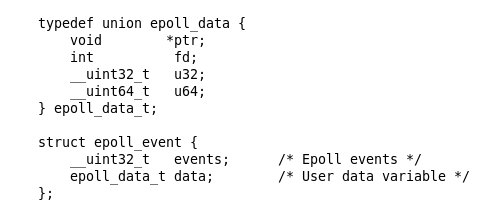
struct pollfd fds[1];//"1"表示只查询一个中断设备
fd = open("/dev/button",O_RDWR);
if(fd <0)
{
printf("can't opent /dev/button\n");
return 0;
}
fds[0].fd = fd;
fds[0].events = POLLIN;
while(1)
{
ret = poll(fds, 1, 5000);//5秒超时时间 poll(fds, 1, 5000);"1"表示查询一个文件
if(0 == ret)
{
printf("timeout !\n");
}
else
{
read(fd,&key_vals,1);
printf("key_vals = 0x%x\n",key_vals);
}
}
return 0;
}





 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有