Cesium中,轨迹漫游的核心是借助CZML格式,CZML是Cesium团队制定的一种用来描述动态场景的JSON架构语言,可以用来描述点、线、多边形、体、模型及其他图元,同时定义它
Cesium中,轨迹漫游的核心是借助CZML格式,CZML是Cesium团队制定的一种用来描述动态场景的JSON架构语言,可以用来描述点、线、多边形、体、模型及其他图元,同时定义它们是怎样随时间变化的,参考CZML Structure · AnalyticalGraphicsInc/czml-writer Wiki (github.com)
我这里放一个简单的模板吧
[
{
"id": "document",
"version": "1.0"
},
{
"id": "pathRoamingEntity",
"availability": "2012-08-04T10:00:00Z/2012-08-04T20:00:00Z",
"model": {
"scale": 1,
"minimumPixelSize": 100,
"maximumScale": 20
},
"path": {
"material": {"solidColor": {"color": {"rgba": [255, 255, 0, 255]}}},
"width": [{"number": 5.0}],
"show": [{"boolean": false}],
"resolution": 5.0
},
"orientation": {
"velocityReference": "#position"
},
"viewFrom": {
"cartesian": [-2080, -1715, 779]
},
"position": {
"interpolationAlgorithm": "LINEAR",
"epoch": "2012-08-04T10:00:00Z",
"forwardExtrapolationType": "HOLD",
"cartographicDegrees": []
}
}
]
CZML 不过多赘述,我们先说思路,其实思路不难,配置好 CZML,加入到 dataSoures 中,开启动画即可
我们先定义一段路径:
let ps = [
[119.44037341293323, 35.34197106899855, 5.872732096309598],
[119.44252948098223, 35.34223901339689, 6.31711015359973],
[119.4560550425358, 35.34202148007459, 22.906707659456394],
[119.45610614546445, 35.32762691608659, 3.0852594116911622],
]
将线添加到场景中,注意 地理坐标 转 投影坐标
let car3 = formCartographicArrS(ps)
// 添加线
let pathEntity = new Cesium.Entity({
polyline: {
// 注意,此处position为笛卡尔坐标系
positions: car3,
width: 4,
clampToGround: true,
arcType: Cesium.ArcType.RHUMB,
}
})
viewer.entities.add(pathEntity)
此时,若我们的场景中有地形,则要修改一下高度,比如我们要模型离地100米飞行
// 清洗height,改为相对高度,配合 heightReference
let height = 0
ps.forEach((v, k ,arr)=>{
arr[k][2] = 0 + height
})
在上述的CZML中,有很多必要属性我们没有添加,比如模型,比如路径
此处主要干了三个事:
1.添加模型信息
2.添加路径信息
3.计算速度,修改时间
//添加模型
czml[1].model.gltf = "./CesiumMilkTruck/CesiumMilkTruck.glb"
czml[1].model.scale = 0.01
// CZML中通过时间来控制速度,我们先定义一个起始时间并复制一份当前时间,并记录一份结束时间
const startTime = Cesium.JulianDate.fromIso8601('2012-08-04T10:00:00Z');
let currentTime = startTime.clone();
let lastPosition = null;
// 为了让模型保持匀速运动,我们需要手动计算时间,此处借助 turfJS 库
let speed = 50
ps.forEach(v => {
if(lastPosition){
// 对于起始点,我们直接传入起始时间即可,此处为非起始点逻辑
let from = turf.point(lastPosition);
let to = turf.point(v);
// 计算两点间长度
let distance = turf.distance(from, to, {units: 'meters'});
// 计算新时间
currentTime = Cesium.JulianDate.addSeconds(currentTime, Math.ceil(distance / speed), currentTime);
}
// 添加路径,注意坐标为经纬度,且格式为 [时间节点,经度, 维度, 高],此处时间节点就是用来计算速度的,每一个线段起始时间节点与终止时间节点定义了当前线段的速度
czml[1].position.cartographicDegrees.push(Cesium.JulianDate.toIso8601(currentTime))
czml[1].position.cartographicDegrees.push(v[0])
czml[1].position.cartographicDegrees.push(v[1])
czml[1].position.cartographicDegrees.push(v[2])
lastPosition = v
})
// 根据上述计算的时间修改 availability
czml[1].availability = `${startTime}/${currentTime}`
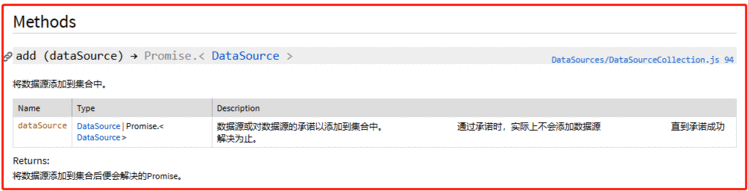
添加 dataSourecs,是一个异步Promise,回调参数为我们传入的dataSource
同时注意参数,该方法允许我们传入 Promise,所以对于下述静态方法定义的 CZML 数据源无需回调,直接将 Promise 作为参数传入即可
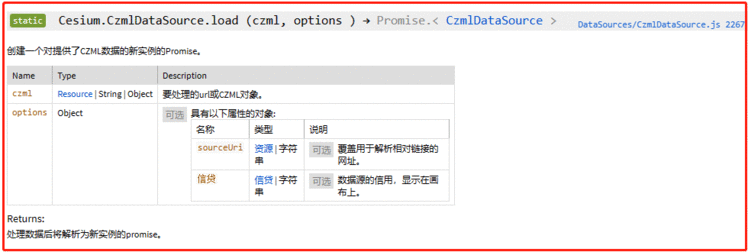
// 添加 CZML
viewer.dataSources.add(
Cesium.CzmlDataSource.load(czml)
).then(c=>{
...
})
到此时其实已经完成大部分了,但此时我们的模型可能还没有动起来(受 clock 影响),所以在回调中我们要做一些工作
// c为回调参数
// 获取Entity
let e = c.entities.getById("pathRoamingEntity")
// 设置高度为贴地相对高度
e.model.heightReference = Cesium.HeightReference.RELATIVE_TO_GROUND
viewer.clock.multiplier = 1
// 让时间动起来
viewer.clock.shouldAnimate = true;
接下来我们希望视角随着模型移动,视角随着模型移动有两种方法
1.使用 trackedEntity
在 viewer 中,提供了一个非常便捷的方法,有一个属性 trackedEntity,可以使当前的相机锁定一个Entity
配合 CZML 中的 viewFrom,允许我们设置一个相对的投影坐标(笛卡尔)作为初始视角,是以当前 CZML 做一个偏移
即可配置初始相机方向同时跟踪
viewer.trackedEntity = c.entities.getById("pathRoamingEntity")
2.上述方法虽然完成了跟踪,但是实际我们并没有能够使相机随着模型运动的方向随时改变,所以第二种方法是使用 addEventListener
如下所示,其实实现方法有很多种,大同小异,此处采用的是 Camera 中的 lookAt 方法
我们先看一下lookAt,lookAt 要求我们提供两个参数,目标位置 和 距离目标的偏移,目标位置我们可以直接记录,目标偏移量就需要我们手动算一下了,
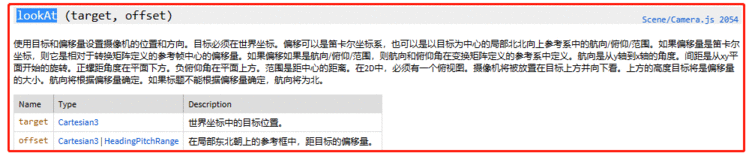
大致思路就是,根据前一个点和后一个点算出 heading 朝向,因为 heading 代表 Z 轴旋转,所以比较重要,pitch 代表 Y 轴朝向,我们可以自己选择一个合适的角度,注意,俯角是负数
// 前一个点
let prePoint = null
viewer.scene.postRender.addEventListener(() => {
if (e && viewer.clock.shouldAnimate) {
// 获取当前时间的位置
let curPoint = e.position.getValue(viewer.clock.currentTime)
if(prePoint){
// 计算 heading
let heading = getHeading(prePoint, curPoint)
// 计算 pitch
let pitch = Cesium.Math.toRadians(-30.0);
let range = 100;
viewer.camera.lookAt (
curPoint,
new Cesium.HeadingPitchRange(heading, pitch, range)
);
}
// 当前点在下一次渲染时为前一个点
prePoint = Cesium.Cartesian3.clone(curPoint)
}
});
function getHeading(pointA, pointB){
//建立以点A为原点,X轴为east,Y轴为north,Z轴朝上的坐标系
const transform = Cesium.Transforms.eastNorthUpToFixedFrame(pointA);
//向量AB
const positiOnvector= Cesium.Cartesian3.subtract(pointB, pointA, new Cesium.Cartesian3());
//因transform是将A为原点的eastNorthUp坐标系中的点转换到世界坐标系的矩阵
//AB为世界坐标中的向量
//因此将AB向量转换为A原点坐标系中的向量,需乘以transform的逆矩阵。
const vector = Cesium.Matrix4.multiplyByPointAsVector(Cesium.Matrix4.inverse(transform, new Cesium.Matrix4()), positionvector, new Cesium.Cartesian3());
//归一化
const direction = Cesium.Cartesian3.normalize(vector, new Cesium.Cartesian3());
//heading
const heading = Math.atan2(direction.y, direction.x) - Cesium.Math.PI_OVER_TWO;
return Cesium.Math.TWO_PI - Cesium.Math.zeroToTwoPi(heading);
}
注意:视角追踪有一个问题,当地形起伏过大时,相机可能飞入地形下面!
到此,轨迹漫游算是结束了!后续我还会写一些之前做 SDK 时的一些功能,小弟目前在读GIS研究生一枚,代码中不足之处,欢迎各位大佬指正!



 京公网安备 11010802041100号
京公网安备 11010802041100号