linux驱动阅读笔记
作者:icrochildren1035_175 | 来源:互联网 | 2017-08-06 20:45
linux驱动阅读笔记--Linux通用技术-Linux编程与内核信息,下面是详情阅读。
具体到LINUX系统里,设备驱动程序所提供的这组入口点由一个结构来向系统进行说明,此结构定义为:
#include
struct file_operations {
int (*lseek)(struct inode *inode,struct file *filp,
off_t off,int pos);
int (*read)(struct inode *inode,struct file *filp,
char *buf, int count);
int (*write)(struct inode *inode,struct file *filp,
char *buf,int count);
int (*readdir)(struct inode *inode,struct file *filp,
struct dirent *dirent,int count);
int (*select)(struct inode *inode,struct file *filp,
int sel_type,select_table *wait);
int (*ioctl) (struct inode *inode,struct file *filp,
unsigned int cmd,unsigned int arg);
int (*mmap) (void);
int (*open) (struct inode *inode, struct file *filp);
void (*release) (struct inode *inode, struct file *filp);
int (*fsync) (struct inode *inode, struct file *filp);
};
其中,struct inode提供了关于特别设备文件/dev/driver(假设此设备名为driver)的信息,它的定义为:
#include
struct inode {
dev_t i_dev;
unsigned long i_ino; /* Inode number */
umode_t i_mode; /* Mode of the file */
nlink_t i_nlink;
uid_t i_uid;
gid_t i_gid;
dev_t i_rdev; /* Device major and minor numbers*/
off_t i_size;
time_t i_atime;
time_t i_mtime;
time_t i_ctime;
unsigned long i_blksize;
unsigned long i_blocks;
struct inode_operations * i_op;
struct super_block * i_sb;
struct wait_queue * i_wait;
struct file_lock * i_flock;
struct vm_area_struct * i_mmap;
struct inode * i_next, * i_prev;
struct inode * i_hash_next, * i_hash_prev;
struct inode * i_bound_to, * i_bound_by;
unsigned short i_count;
unsigned short i_flags; /* Mount flags (see fs.h) */
unsigned char i_lock;
unsigned char i_dirt;
unsigned char i_pipe;
unsigned char i_mount;
unsigned char i_seek;
unsigned char i_update;
union {
struct pipe_inode_info pipe_i;
struct minix_inode_info minix_i;
struct ext_inode_info ext_i;
struct msdos_inode_info msdos_i;
struct iso_inode_info isofs_i;
struct nfs_inode_info nfs_i;
} u;
};
struct file主要用于与文件系统对应的设备驱动程序使用。当然,其它设备驱动程序也可以使用它。它提供关于被打开的文件的信息,定义为:#include
struct file {
mode_t f_mode;
dev_t f_rdev; /* needed for /dev/tty */
off_t f_pos; /* Curr. posn in file */
unsigned short f_flags; /* The flags arg passed to open */
unsigned short f_count; /* Number of opens on this file */
unsigned short f_reada;
struct inode *f_inode; /* pointer to the inode struct */
struct file_operations *f_op;/* pointer to the fops struct*/
};
在结构file_operations里,指出了设备驱动程序所提供的入口点位置,分别是
(1) lseek,移动文件指针的位置,显然只能用于可以随机存取的设备。
(2) read,进行读操作,参数buf为存放读取结果的缓冲区,count为所要读取的数据长度。返回值为负表示读取操作发生错误,否则返回实际读取的字节数。对于字符型,要求读取的字节数和返回的实际读取字节数都必须是inode->i_blksize的的倍数。
(3) write,进行写操作,与read类似。
(4) readdir,取得下一个目录入口点,只有与文件系统相关的设备驱动程序才使用。
(5) selec,进行选择操作,如果驱动程序没有提供select入口,select操作将会认为设备已经准备好进行任何的I/O操作。
(6) ioctl,进行读、写以外的其它操作,参数cmd为自定义的的命令。
(7) mmap,用于把设备的内容映射到地址空间,一般只有块设备驱动程序使用。
(8) open,打开设备准备进行I/O操作。返回0表示打开成功,返回负数表示失败。如果驱动程序没有提供open入口,则只要/dev/driver文件存在就认为打开成功。
(9) release,即close操作。
设备驱动程序所提供的入口点,在设备驱动程序初始化的时候向系统进行登记,以便系统在适当的时候调用。LINUX系统里,通过调用register_chrdev向系统注册字符型设备驱动程序。register_chrdev定义为:
#include
#include
int register_chrdev(unsigned int major, const char *name, struct file_operations *fops);
其中,major是为设备驱动程序向系统申请的主设备号,如果为0则系统为此驱动程序动态地分配一个主设备号。name是设备名。fops就是前面所说的对各个调用的入口点的说明。此函数返回0表示成功。返回-EINVAL表示申请的主设备号非法,一般来说是主设备号大于系统所允许的最大设备号。返回-EBUSY表示所申请的主设备号正在被其它设备驱动程序使用。如果是动态分配主设备号成功,此函数将返回所分配的主设备号。如果register_chrdev操作成功,设备名就会出现在/proc/devices文件里。
初始化部分一般还负责给设备驱动程序申请系统资源,包括内存、中断、时钟、I/O端口等,这些资源也可以在open子程序或别的地方申请。在这些资源不用的时候,应该释放它们,以利于资源的共享。在UNIX系统里,对中断的处理是属于系统核心的部分,因此如果设备与系统之间以中断方式进行数据交换的话,就必须把该设备的驱动程序作为系统核心的一部分。设备驱动程序通过调用request_irq函数来申请中断,通过free_irq来释放中断。它们的定义为:
#include
int request_irq(unsigned int irq,
void (*handler)(int irq,void dev_id,struct pt_regs *regs),
unsigned long flags,
const char *device,
void *dev_id);
void free_irq(unsigned int irq, void *dev_id);
参数irq表示所要申请的硬件中断号。handler为向系统登记的中断处理子程序,中断产生时由系统来调用,调用时所带参数irq为中断号, dev_id为申请时告诉系统的设备标识,regs为中断发生时寄存器内容。device为设备名,将会出现在/proc/interrupts文件里。 flag是申请时的选项,它决定中断处理程序的一些特性,其中最重要的是中断处理程序是快速处理程序(flag里设置了SA_INTERRUPT)还是慢速处理程序(不设置SA_INTERRUPT),快速处理程序运行时,所有中断都被屏蔽,而慢速处理程序运行时,除了正在处理的中断外,其它中断都没有被屏蔽。
在LINUX系统中,中断可以被不同的中断处理程序共享,这要求每一个共享此中断的处理程序在申请中断时在flags里设置SA_SHIRQ,这些处理程序之间以dev_id来区分。如果中断由某个处理程序独占,则dev_id可以为NULL。request_irq返回0表示成功,返回- INVAL表示irq>15或handler==NULL,返回-EBUSY表示中断已经被占用且不能共享。作为系统核心的一部分,设备驱动程序在申请和释放内存时不是调用malloc和free,而代之以调用kmalloc和kfree,它们被定义为:
#include
void * kmalloc(unsigned int len, int priority);
void kfree(void * obj);
参数len为希望申请的字节数,obj为要释放的内存指针。priority为分配内存操作的优先级,即在没有足够空闲内存时如何操作,一般用 GFP_KERNEL。与中断和内存不同,使用一个没有申请的I/O端口不会使CPU产生异常,也就不会导致诸如“segmentation fault"一类的错误发生。任何进程都可以访问任何一个I/O端口。此时系统无法保证对I/O端口的操作不会发生冲突,甚至会因此而使系统崩溃。因此,在使用I/O端口前,也应该检查此I/O端口是否已有别的程序在使用,若没有,再把此端口标记为正在使用,在使用完以后释放它。这样需要用到如下几个函数:
int check_region(unsigned int from, unsigned int extent);
void request_region(unsigned int from, unsigned int extent, const char *name);
void release_region(unsigned int from, unsigned int extent);
调用这些函数时的参数为:from表示所申请的I/O端口的起始地址;extent为所要申请的从from开始的端口数;name为设备名,将会出现在/proc/ioports文件里。check_region返回0表示I/O端口空闲,否则为正在被使用。
在申请了I/O端口之后,就可以如下几个函数来访问I/O端口:
#include
inline unsigned int inb(unsigned short port);
inline unsigned int inb_p(unsigned short port);
inline void outb(char value, unsigned short port);
inline void outb_p(char value, unsigned short port);
其中inb_p和outb_p插入了一定的延时以适应某些慢的I/O端口。在设备驱动程序里,一般都需要用到计时机制。在LINUX系统中,时钟是由系统接管,设备驱动程序可以向系统申请时钟。与时钟有关的系统调用有:
#include
#include
void add_timer(struct timer_list * timer);
int del_timer(struct timer_list * timer);
inline void init_timer(struct timer_list * timer);
struct timer_list的定义为:
struct timer_list {
struct timer_list *next;
struct timer_list *prev;
unsigned long expires;
unsigned long data;
void (*function)(unsigned long d);
};
其中expires是要执行function的时间。系统核心有一个全局变量JIFFIES表示当前时间,一般在调用add_timer时 jiffies=JIFFIES+num,表示在num个系统最小时间间隔后执行function。系统最小时间间隔与所用的硬件平台有关,在核心里定义了常数HZ表示一秒内最小时间间隔的数目,则num*HZ表示num秒。系统计时到预定时间就调用function,并把此子程序从定时队列里删除,因此如果想要每隔一定时间间隔执行一次的话,就必须在function里再一次调用add_timer。function的参数d即为timer里面的 data项。在设备驱动程序里,还可能会用到如下的一些系统函数:
#include
#define cli() __asm__ __volatile__ ("cli"::)
#define sti() __asm__ __volatile__ ("sti"::)
这两个函数负责打开和关闭中断允许。
#include
void memcpy_fromfs(void * to,const void * from,unsigned long n);
void memcpy_tofs(void * to,const void * from,unsigned long n);
在用户程序调用read 、write时,因为进程的运行状态由用户态变为核心态,地址空间也变为核心地址空间。而read、write中参数buf是指向用户程序的私有地址空间的,所以不能直接访问,必须通过上述两个系统函数来访问用户程序的私有地址空间。memcpy_fromfs由用户程序地址空间往核心地址空间复制, memcpy_tofs则反之。参数to为复制的目的指针,from为源指针,n为要复制的字节数。在设备驱动程序里,可以调用printk来打印一些调试信息,用法与printf类似。printk打印的信息不仅出现在屏幕上,同时还记录在文件syslog里。
LINUX系统下的具体实现
在LINUX里,除了直接修改系统核心的源代码,把设备驱动程序加进核心里以外,还可以把设备驱动程序作为可加载的模块,由系统管理员动态地加载它,使之成为核心地一部分。也可以由系统管理员把已加载地模块动态地卸载下来。
LINUX中,模块可以用C语言编写,用gcc编译成目标文件(不进行链接,作为*.o文件存在),为此需要在gcc命令行里加上-c的参数。在编译时,还应该在gcc的命令行里加上这样的参数:-D__KERNEL__ -DMODULE。由于在不链接时,gcc只允许一个输入文件,因此一个模块的所有部分都必须在一个文件里实现。编译好的模块*.o放在 /lib/modules/xxxx/misc下(xxxx表示核心版本,如在核心版本为2.0.30时应该为 /lib/modules/2.0.30/misc),然后用depmod -a使此模块成为可加载模块。模块用insmod命令加载,用rmmod命令来卸载,并可以用lsmod命令来查看所有已加载的模块的状态。
编写模块程序的时候,必须提供两个函数,一个是int init_module(void),供insmod在加载此模块的时候自动调用,负责进行设备驱动程序的初始化工作。init_module返回0以表示初始化成功,返回负数表示失败。另一个函数是voidcleanup_module (void),在模块被卸载时调用,负责进行设备驱动程序的清除工作。
在成功的向系统注册了设备驱动程序后(调用register_chrdev成功后),就可以用mknod命令来把设备映射为一个特别文件,其它程序使用这个设备的时候,只要对此特别文件进行操作就行了。
推荐阅读
-
本文介绍了学习SLAM的女生的故事,她们选择SLAM作为研究方向,面临各种学习挑战,但坚持不懈,最终获得成功。文章鼓励未来想走科研道路的女生勇敢追求自己的梦想,同时提到了一位正在英国攻读硕士学位的女生与SLAM结缘的经历。 ...
[详细]
蜡笔小新 2023-12-14 17:55:18
-
本文介绍了Python2x和Python3x在语法上的区别,包括print语句的变化、除法运算结果的不同、raw_input函数的替代、class写法的变化等。同时还介绍了Python脚本的解释程序的指定方法,以及在不同版本的Python中如何执行脚本。对于想要学习Python的人来说,本文提供了一些注意事项和技巧。 ...
[详细]
蜡笔小新 2023-12-14 11:27:53
-
-
本文介绍了Linux Shell中括号和整数扩展的使用方法,包括命令组、命令替换、初始化数组以及算术表达式和逻辑判断的相关内容。括号中的命令将会在新开的子shell中顺序执行,括号中的变量不能被脚本余下的部分使用。命令替换可以用于将命令的标准输出作为另一个命令的输入。括号中的运算符和表达式符合C语言运算规则,可以用在整数扩展中进行算术计算和逻辑判断。 ...
[详细]
蜡笔小新 2023-12-12 20:48:58
-
本文介绍了学习恶意软件分析和逆向工程领域时最适合的编程语言,并重点讨论了Python的优点。Python是一种解释型、多用途的语言,具有可读性高、可快速开发、易于学习的特点。作者分享了在本地恶意软件分析中使用Python的经验,包括快速复制恶意软件组件以更好地理解其工作。此外,作者还提到了Python的跨平台优势,使得在不同操作系统上运行代码变得更加方便。 ...
[详细]
蜡笔小新 2023-12-10 18:39:23
-
本文介绍了使用CentOS7.0 U盘刻录工具进行安装的详细步骤,包括使用USBWriter工具刻录ISO文件到USB驱动器、格式化USB磁盘、设置启动顺序等。通过本文的指导,用户可以轻松地使用U盘安装CentOS7.0操作系统。 ...
[详细]
蜡笔小新 2023-12-14 18:55:14
-
本文介绍了字符常量与变量的定义及使用方法,包括字符常量的定义、值和转义字符的表示方法;字符串常量的定义和结束标志;字符型数据与整型数据的区别;字符型变量的定义和内存占用;字符串变量的运算方法。同时提醒注意字符串常量不可赋值给字符型变量,需使用数组或指针进行存取。 ...
[详细]
蜡笔小新 2023-12-13 10:23:41
-
本文介绍了作者在学习OO的第一次作业中所遇到的问题及其解决方案。作者通过建立Multinomial和Monomial两个类来实现多项式和单项式,并通过append方法将单项式组合为多项式,并在此过程中合并同类项。作者还介绍了单项式和多项式的求导方法,并解释了如何利用正则表达式提取各个单项式并进行求导。同时,作者还对自己在输入合法性判断上的不足进行了bug分析,指出了自己在处理指数情况时出现的问题,并总结了被hack的原因。 ...
[详细]
蜡笔小新 2023-12-12 14:51:21
-
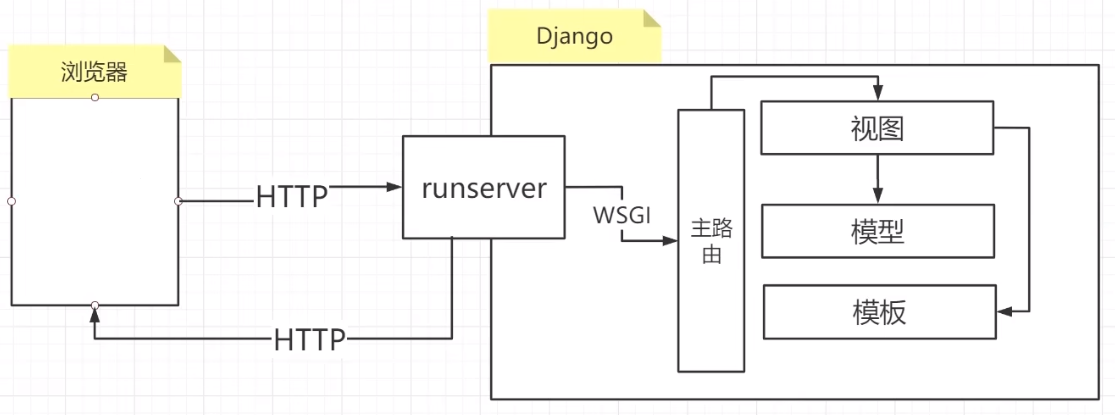
目录1一些概念1.1项目部署1.2WSGI1.3uWSGI1.4Nginx2安装环境与迁移项目2.1项目内容2.2项目配置2.2.1DEBUG2.2.2STAT ...
[详细]
蜡笔小新 2023-12-12 12:15:41
-
这篇文章主要介绍了Python拼接字符串的七种方式,包括使用%、format()、join()、f-string等方法。每种方法都有其特点和限制,通过本文的介绍可以帮助读者更好地理解和运用字符串拼接的技巧。 ...
[详细]
蜡笔小新 2023-12-12 11:15:18
-
本文介绍了在Windows系统上使用C语言命令行参数启动程序并传递参数的方法,包括接收参数程序的代码和bat文件的编写方法,同时给出了程序运行的结果。 ...
[详细]
蜡笔小新 2023-12-12 10:21:44
-
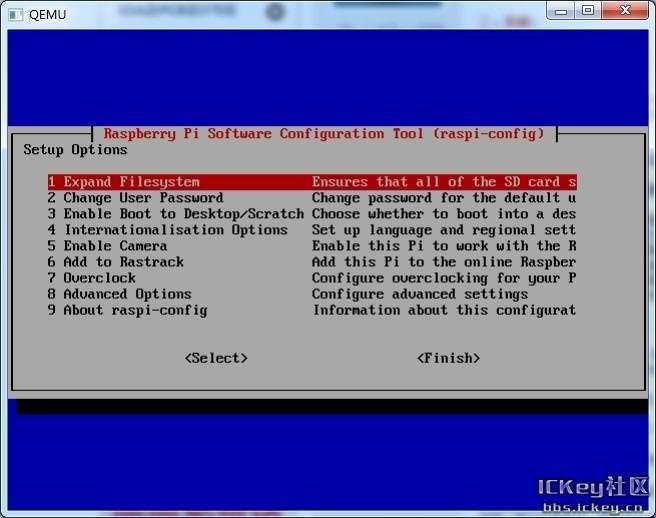
本文介绍了在树莓派上实现语音控制的配置方法和步骤。首先感谢博主Eoman的帮助,文章参考了他的内容。树莓派的配置需要通过sudo raspi-config进行,然后使用Eoman的控制方法,即安装wiringPi库并编写控制引脚的脚本。具体的安装步骤和脚本编写方法在文章中详细介绍。 ...
[详细]
蜡笔小新 2023-12-12 03:02:49
-
本文介绍了使用C语言编写的判断正整数能否被整除的程序,包括输入一个三位正整数,判断是否能被3整除且至少包含数字3的方法。同时还介绍了使用qsort函数进行快速排序的算法。 ...
[详细]
蜡笔小新 2023-12-11 19:40:15
-
本文介绍了使用Python解析C语言结构体的方法,包括定义基本类型和结构体类型的字典,并提供了一个示例代码,展示了如何解析C语言结构体。 ...
[详细]
蜡笔小新 2023-12-11 18:45:50
-
本文深入讲解了C语言中常量与变量的概念及其深入实质,强调了对常量和变量的理解对于学习指针等后续内容的重要性。详细介绍了常量的分类和特点,以及变量的定义和分类。同时指出了常量和变量在程序中的作用及其对内存空间的影响,类似于const关键字的只读属性。此外,还提及了常量和变量在实际应用中可能出现的问题,如段错误和野指针。 ...
[详细]
蜡笔小新 2023-12-11 09:28:31
-
本文旨在全面介绍Windows内存管理机制及C++内存分配实例中的内存映射文件。通过对内存映射文件的使用场合和与虚拟内存的区别进行解析,帮助读者更好地理解操作系统的内存管理机制。同时,本文还提供了相关章节的链接,方便读者深入学习Windows内存管理及C++内存分配实例的其他内容。 ...
[详细]
蜡笔小新 2023-12-10 18:30:17
-
icrochildren1035_175
这个家伙很懒,什么也没留下!






 京公网安备 11010802041100号
京公网安备 11010802041100号