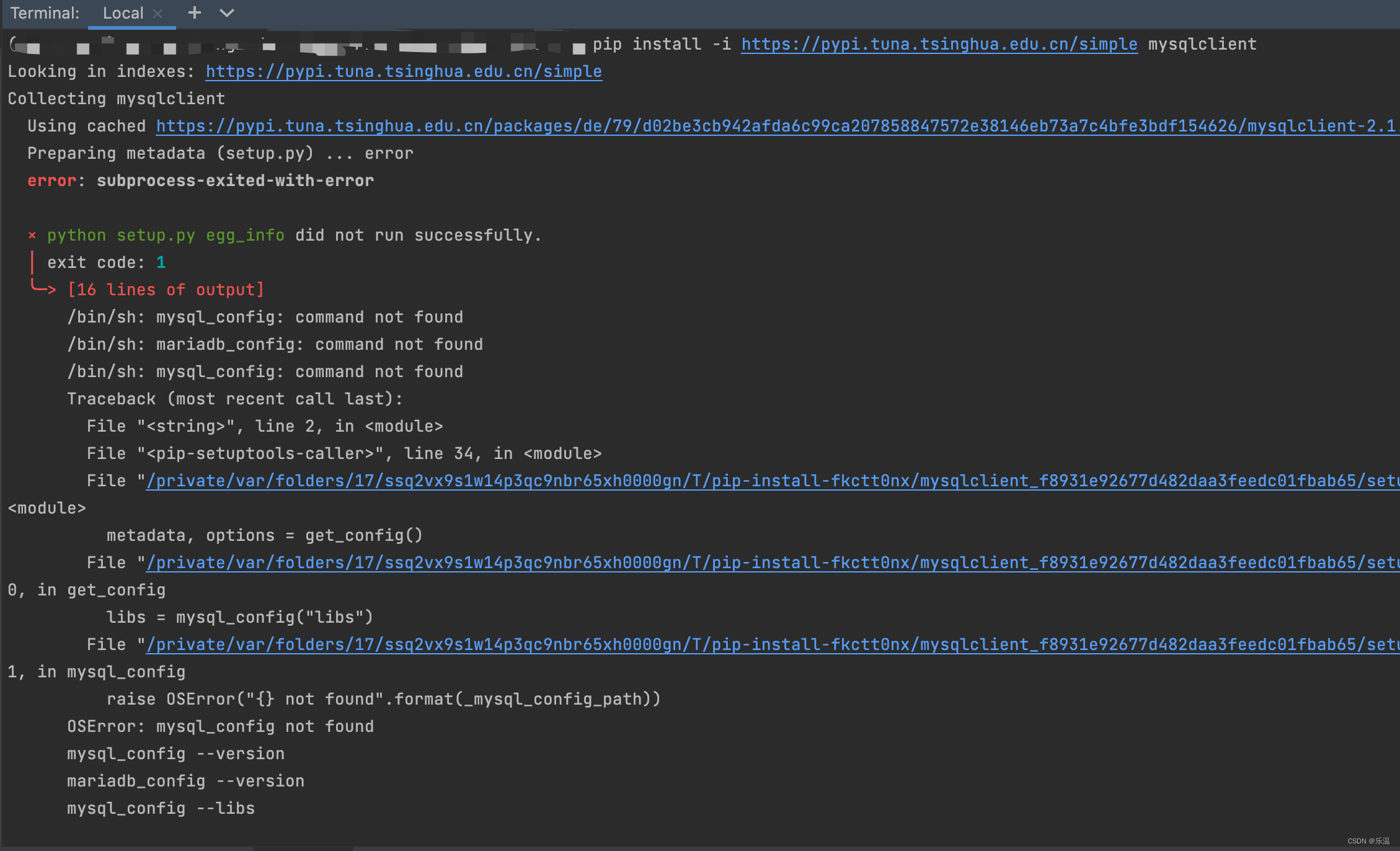
Install proto3 Please check README.md for proto3 installation instructions. 软件包: 安装后:更新protobu文件 protoc -I=S R C D I R − − c p p o u t = SRC_DIR --cpp_out=SRC D IR−−cpp o ut=DST_DIR $SRC_DIR/addressbook.proto 例如:当前目录里的proto protoc -I=./ --cpp_out=./ xxx.proto
Install glog 原文的打不开,现在用的pip install glog
Install OpenCV 3.4.5++ and PCL 1.7++
opencv demo验证&#xff1a; cd <你的路径>/opencv-3.4.5/samples/cpp/example_cmake cmake. make ./opencv_example 如果能打开相机说明成功&#xff01;&#xff01;&#xff01;&#xff01;&#xff01;&#xff01;&#xff01;
limbo build&#xff1a; clone limbo cd LidarRoadBoundaryDetection git clone https://github.com/resibots/limbo
Build limbo Then please check official documentation to build and intall limbo&#xff1a;https://github.com/resibots/libcmaes 有时候网络问题&#xff1a;GitHub的文件无法clone&#xff0c;需要翻墙。
目前这里有些问题&#xff0c;好像没有编成&#xff0c;导致demo frame无法运行。
编译问题&#xff1a; 1 error&#xff1a;#error PCL requires C&#43;&#43;14 or above 解决&#xff1a;在CMakeList中新增一句&#xff1a; set(CMAKE_CXX_STANDARD 14) 2 boost ‘boost::mutex’ has not been declared: 解决&#xff1a; 安装boost https://blog.csdn.net/hailangdeyingzi/article/details/73527877 上面不行&#xff0c;试试&#xff1a; www.cnblogs.com/oracleloyal/p/6060779.html
更新nlopt安装方式&#xff1a; http://www.resibots.eu/limbo/tutorials/compilation.html ./configure --with-cxx --enable-shared --without-python --without-matlab --without-octave make sudo make install
limbo build成功
出现return errr
usr/bin/ld: lib/libextract.a(road_boundary.pb.cc.o)&#x1f626;.data.rel.ro&#43;0x50): more undefined references to &#96;google::protobuf::Message::CopyWithSizeCheck(google::protobuf::Message*, google::protobuf::Message const&)’ follow collect2: error: ld returned 1 exit status 以下操作仍然不能解决&#xff0c;但proto安装成功 proto anzhuang gengxin: https://github.com/protocolbuffers/protobuf/blob/master/src/README.md https://blog.csdn.net/kdchxue/article/details/81046192
上个 error solved!
/home/gj/lidar/LidarRoadBoundaryDetection/limbo/src/limbo/serialize/text_archive.hpp:72:35: error: variable ‘std::ofstream ofs’ has initializer but incomplete type 72 | std::ofstream ofs(fname(object_name).c_str());
本文介绍了阿里Treebased Deep Match(TDM)的学习笔记,同时回顾了工业界技术发展的几代演进。从基于统计的启发式规则方法到基于内积模型的向量检索方法,再到引入复杂深度学习模型的下一代匹配技术。文章详细解释了基于统计的启发式规则方法和基于内积模型的向量检索方法的原理和应用,并介绍了TDM的背景和优势。最后,文章提到了向量距离和基于向量聚类的索引结构对于加速匹配效率的作用。本文对于理解TDM的学习过程和了解匹配技术的发展具有重要意义。 ...
[详细]




 京公网安备 11010802041100号
京公网安备 11010802041100号